Kad runa ir par rūpniecības un inženierzinātņu jomas uzlabošanu, dzinējiem ir izšķiroša atbildība. Plašā motoru izmantošana ir uzlabojusi gan jaudas, gan vadības lietojumus. Ar šo milzīgo motoru regulēšanas nozīmi katru gadu palielinās arī lietošana. Stepper motors ir sava veida vadības motors, kas darbojas ar ātruma un pozīcijas regulēšanu, neizmantojot atgriezenisko saiti. Šī parādība tiek saukta par atvērtā cikla vadības motoru. Tātad šajā rakstā ir skaidri aprakstīts viens no soļu motoru veidiem, un tas ir “Mainīgs Nevēlēšanās Stepper Motor ”. Turpmākajās sadaļās ir paskaidrots, kā šī ierīce darbojas, principā tiek izmantotas priekšrocības un trūkumi.
Kas ir mainīga nevēlēšanās soļu motors?
Šis ir visplašākais stepper motoru veids. Tam ir visvieglākais dizains, salīdzinot ar citiem soļu motoru veidiem. Tā kā rotora sekcija nav magnetizēta, starp statoru un rotors . Tāpēc mainīgā nevēlēšanās soļu motors neradīs nevienu aizturi griezes moments .
Dinamiskā griezes momenta ģenerēšana ir pārāk minimāla, taču tai piemīt griezes momenta samazināšanās, kad motors darbojas ar lielu ātrumu. Tātad šis mainīgā nevēlēšanās motors galvenokārt ir piemērots vidēja vai liela ātruma ātrumam. Šiem motoriem ir arī augsts trokšņu diapazons, tāpēc tas ir piemērots scenārijiem, kur troksnis netiek ņemts vērā.
Princips
Pamata mainīga nevēlēšanās soļu motora darbības princips tas ir atkarīgs no vairākām rotora ierīces nevēlēšanās vietām. Kad statora fāzes saņem sprieguma signālu un saņem ierosmi, tiks izveidots magnētiskais lauks, kura ass līnijas atrodas pāri poliem.
Un tagad, kad rotors mēģina griezties tādā ceļā, ka tas iegūst nelielu nevēlēšanos. Šis apgrieziens atbilst tam, ka statora izveidotā magnētiskā lauka ass ir tāda pati kā ass, kas iet pāri rotora poliem (jebkuriem diviem poliem).
Mainīga nevēlēšanās soļu motora konstrukcija
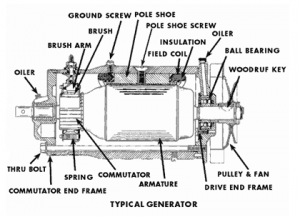
Galvenokārt šī ierīce sastāv no ievainota statora un daudzzobu rotora sekcijām. Statora tinumi ir pārklāti ar silīcija tērauda pārklājumu masīvu. Parasti tas attiecas uz trim fāzēm, kas ir izkaisītas starp polu pāriem. Tātad stabu skaits statora sadaļā ir tāds pats kā pat vairākās fāzēs tiem esošajiem tinumiem, kas ir pārklāti ar statoru. Zemāk attēlotajā attēlā statoram ir 12 līdzīgi atdalīti projekcijas stabi, kur katrs stabs ir pārklāts

Mainīga nevēlēšanās soļu motora konstrukcija
ar ierosmes spoli. Pēc tam trīs fāzes tiek aktivizētas, izmantojot a Līdzstrāvas avots izmantojot cietvielu slēdžu atbalstu. Tā kā rotora sekcijai nav tinumu, un tas tiek uzskatīts par ievērojamu stabu tipu, kas izgatavots no rievotiem tērauda pārklājumiem. Šeit statora zobiem un rotora projicētajiem zobiem ir līdzīgs platums, savukārt stabu skaits abās šajās sadaļās ir atšķirīgs, kas piedāvā iespēju sākt pats un ļauj motoram griezties divos virzienos.
Šeit attiecība starp statora un rotora poliem, kas atbilst trīsfāžu mainīgajai negribai stepper motors tiek dots kā
Nr = ns ± (Ns / m)
Kur ‘Ns’ atbilst statora stabu skaitam
‘Nr’ atbilst rotora stabiem
Darba scenārijs
Mainīgā nevēlēšanās pakāpienu motora darbību var viegli izskaidrot, ņemot vērā trīs gadījumus. Sīkāk informējiet mūs par šīs ierīces darbību. Apsveriet zemāk redzamo attēlu.
Darbs tiek izskaidrots, jo trīs tinumi X, Y un Z ir savienoti virknē, un tie tiek baroti viens pēc otra, izmantojot trīs slēdžus S1, S2 un S3.
1. scenārijs
Kad barošana tiek nodrošināta pāri XX malām1, aizverot S1 slēdzi. Tā kā starp XX ir magnētiskie stabi1tinumiem, pateicoties pievilkšanās spēkam starp magnētiskajiem poliem, rotors mēģina panākt zemu nevēlēšanās stāvokļa vērtību. Tātad 1 un 3 rotora ass mēģina būt vienā līnijā ar XX1stabu ass.

Darba scenārijs 1
2. scenārijs
Ja barošana tiek nodrošināta pāri malām YY1, tad statora polu magnētiskajā asī būs modifikācija. Tagad rotors mēģina panākt zemu nevēlēšanās virzienu, tādējādi radot rotora kustību. Šeit rotora stabu 2 un 4 ass kļūst tik tuvu YY1tinumi. Tas rada rotora rotāciju un 2. un 4. rotora ass mēģina būt vienā līnijā ar YY1stabu ass. Tādējādi rotora kustība pārvietosies par 30 grādiem.

Mainīga nevēlēšanās soļu motora 2. scenārijs
3. scenārijs
Tādā pašā veidā, kad ZZ1 tinumus baro S3, padarot XX1 un YY par atvienotiem. Rotora ass magnētiskie stabi mēģina izlīdzināties ar statora asi. Tādējādi rotora kustība pārvietosies par 30 grādiem, tātad no XX kopējā rotācija būs 60 grādi1ir ZZ1.

3. darba scenārijs
Veiksmīgi izpildot trīs fāzes atbilstošā veidā, motors pabeidz vienu apgriezienu 12 soļos. Un rotora virziens ir balstīts uz piegādes sērijām, kas tiek piegādātas statora fāzei. Tad griezes momenta ģenerēšanai, kas darbojas ierīcē, ir tieša proporcija fāzes strāvas dubultai, kas ir T α idivi.
Priekšrocības un trūkumi
The mainīga nevēlēšanās soļu motora priekšrocības ir:
- Paaugstināti paātrinājuma rādītāji
- Viegli vadāma un rentabla
- Ātra dinamiska reakcija
- Griezes momenta attiecība pret inerci ir lielāka
The mainīgā nelabprātīgā soļa motora trūkumi ir:
- Ja ir milzīgas inerciālas slodzes, jauda ir minimāla
- Būs izejas jaudas ierobežojums
Tas viss attiecas uz detalizētu šīs ierīces koncepciju. Šajā sadaļā ir sniegts paskaidrojums par mainīgas nevēlamības pakāpienu motora darbību, izmantošanu, dizainu un darbības principu. Turklāt, arī zināt, ko mainīgā nevēlēšanās soļu motora pielietojums un tā izmantošana vairākos domēnos ir.