Kontūru, kas ļauj pieslēgtam motoram darboties pulksteņrādītāja kustības virzienā un pretēji pulksteņrādītāja virzienam, izmantojot alternatīvus ieejas trigerus, sauc par divvirzienu kontroliera ķēdi.
Pirmajā zemāk esošajā projektā ir aplūkota pilna tilta vai H tilta balstīta divvirzienu motora kontroliera ķēde, izmantojot 4 opampus no IC LM324. Otrajā rakstā mēs uzzinām par lielas griezes momenta divvirzienu motora kontroliera ķēdi, izmantojot IC 556
Ievads
Parasti mehāniskie slēdži ir pieraduši pielāgot līdzstrāvas motora rotācijas virzienu. Izmantotā sprieguma un motora polaritātes regulēšana pagriežas pretējā virzienā!
No vienas puses, tam var būt trūkums, ka, lai mainītu sprieguma polaritāti, ir jāpievieno DPDT slēdzis, taču mums ir darīšana tikai ar slēdzi, kas padara procedūru diezgan vienkāršu.
Tomēr DPDT var būt viena nopietna problēma, tā rotācijas kustības laikā nav ieteicams pēkšņi apgriezt spriegumu pār līdzstrāvas motoru. Tas var izraisīt pašreizējo smaile, kas, iespējams, varētu sadedzināt saistīto ātruma regulatoru.
Turklāt jebkura veida mehāniskā spriedze var izraisīt līdzīgas problēmas. Šī shēma viegli pārvar šīs komplikācijas. Virzienu un ātrumu kontrolē ar vientuļa potenciometra palīdzību. Pagriežot trauku noteiktā virzienā, motors sāk griezties.
Pārslēdzot trauku pretējā virzienā, motors var pagriezties pretējā kustībā. Katla vidējā pozīcija izslēdz motoru, nodrošinot, ka motors vispirms palēninās un pēc tam apstājas, pirms tiek mēģināts mainīt virzienu.
Tehniskās specifikācijas
Spriegums: Ķēde un motors izmanto kopējo barošanas avotu. Tas nozīmē, ka tāpēc, ka augstākais darba spriegums LM324 ir 32 VDC, tas arī kļūst par maksimālo spriegumu, kas pieejams motora darbināšanai.
Pašreizējais: IRFZ44 MOSFET ir paredzēts 49A, ar IRF4905 varēs rīkoties ar 74A. Neskatoties uz to, PCB sliedes, kas iet no MOSFET tapām līdz skrūvju spaiļu blokam, var vienkārši pārvaldīt apmēram 5A. To varētu uzlabot, lodējot vara stieples gabalus virs PCB sliedēm.
Tādā gadījumā pārliecinieties, ka MOSFET nekļūst pārāk karsts - ja tas notiek, tad šīm ierīcēm būs jāuzstāda lielāki radiatori.
LM324 Pinouts

DC Motoru divvirzienu kontrole, izmantojot LM324
Būtībā jūs atradīsit 3 veidus noregulēt līdzstrāvas motoru ātrumu :
1. Lai sasniegtu ideālo paātrinājumu, izmantojot mehanizētus pārnesumus: Šī pieeja bieži vien pārsniedz vairākuma entuziastu, kuri praktizē mājas darbnīcās, ērtības.
divi. Motora sprieguma samazināšana, izmantojot virknes rezistoru. Tas noteikti var būt neefektīvs (jauda tiks izkliedēta rezistorā), kā arī samazināt griezes momentu.
Arī motora patērētā strāva palielinās, palielinoties motora slodzei. Palielināta strāva nozīmē lielāku sprieguma kritumu pāri sērijas rezistoram un līdz ar to arī samazinātu motora spriegumu.
Tad motors piepūlas, velkot vēl lielāku strāvas daudzumu, izraisot motora apstāšanos.
3. Pieliekot motoram visu barošanas spriegumu īsos impulsos: Šī metode atbrīvojas no sērijas pilināmā efekta. To sauc par impulsa platuma modulāciju (PWM), un tā ir stratēģija, kas atrodama šajā ķēdē. Ātrie impulsi ļauj motoram darboties lēni, pagarinātie impulsi ļauj motoram darboties ātrāk.

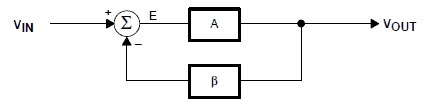
KĀ TĀS FUNKCIJAS (sk. Shēmu)
Ķēdi varētu sadalīt četros posmos:
1. Motora vadība - IC1: A
2. Trīsstūra viļņu ģenerators - IC1: B
3. Sprieguma salīdzinātāji - IC1: C un D
4. Motora piedziņa - Q3-6
Sāksim ar motora vadītāja posmu, kas koncentrēts ap MOSFET Q3-6. Tikai daži no šiem MOSFET jebkurā brīdī paliek aktivizētā stāvoklī. Kamēr Q3 un Q6 ir ieslēgti, strāva pārvietojas pa motoru un liek tam griezties vienā virzienā.
Tiklīdz Q4 un Q5 ir darba stāvoklī, pašreizējā cirkulācija tiek mainīta pretēji un motors sāk griezties pretējā virzienā. IC1: C un IC1: D nodarbojas ar to, kuri MOSFET ir ieslēgti.
Opampi IC1: C un IC1: D ir vadi kā sprieguma salīdzinātāji. Atskaites spriegumu šiem opampiem rada rezistora sprieguma dalītājs R6, R7 un R8.
Ievērojiet, ka atskaites spriegums IC1: D ir pievienots “+” ieejai, bet IC1: C tas ir savienots ar ieeju “-”.
Tas nozīmē, ka IC1: D tiek aktivizēts ar spriegumu, kas ir lielāks par tā atsauci, turpretī IC1: C tiek piedāvāts ar zemāku spriegumu nekā tā atsauce. Opamp IC1: B ir konfigurēts kā trīsstūra viļņu ģenerators un piegādā aktivizācijas signālu attiecīgajiem sprieguma salīdzinātājiem.
Lietotajām vērtībām frekvence ir aptuveni apgriezta R5 un C1 - 270Hz laika konstante.
Samazinot R5 vai C1, palielinās frekvence, palielinoties kādam no tiem, samazināsies frekvence. Trijstūra viļņa maksimālās un maksimālās izejas līmenis ir daudz mazāks nekā starpība starp divām sprieguma atsaucēm.
Tāpēc abus salīdzinātājus ir ārkārtīgi grūti aktivizēt vienlaikus. Vai arī visi 4 MOSFET sāktu vadīt, izraisot īssavienojumu un tos visus sabojājot.
Trijstūra viļņu forma ir strukturēta ap līdzstrāvas nobīdes spriegumu. Nobīdītā sprieguma palielināšana vai samazināšana attiecīgi maina trijstūra viļņa impulsa stāvokli.
Pārslēdzot trijstūra viļņu uz augšu, aktivizējas salīdzinājuma IC1: D aktivizēšana, samazinot rezultātu, lai aktivizētu salīdzinājumu IC1: C. Kad trīsstūra viļņa sprieguma līmenis ir divu sprieguma atsauču vidū, neviens no salīdzinātājiem netiek inducēts. Līdzstrāvas nobīdes spriegumu regulē potenciometrs P1 caur IC1: A, kas paredzēts kā sprieguma sekotājs.
Tas dod zemas izejas pretestības sprieguma avotu, ļaujot līdzstrāvas nobīdes spriegumam būt mazāk pakļautam IC1: B slodzes ietekmei.
Kad “katls” tiek ieslēgts, līdzsvara nobīdes spriegums sāk mainīties vai nu uz augšu, vai uz leju, pamatojoties uz virzienu, kurā katls tiek pagriezts. Diods D3 nodrošina kontroliera reversās polaritātes aizsardzību.
Rezistors R15 un kondensators C2 ir vienkāršs zemfrekvences filtrs. Tas ir domāts, lai notīrītu visus sprieguma tapas, ko rada MOSFET, kad tie ieslēdz barošanas strāvu motoram.
Detaļu saraksts

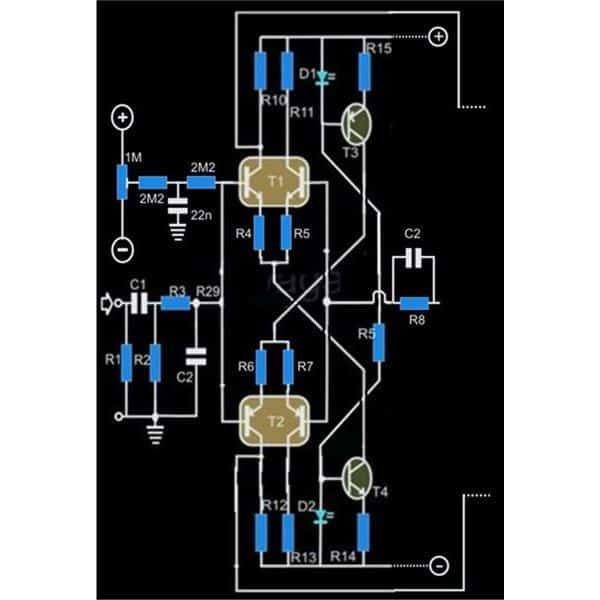
2) Divvirzienu motora vadība, izmantojot IC 556
Līdzstrāvas motoru ātruma un divvirzienu vadība ir salīdzinoši vienkārša. Neatkarīgi darbināmiem motoriem ātrums principā ir barošanas sprieguma lineāra funkcija. Motori ar pastāvīgu magnētu ir patstāvīgi darbināmu motoru apakškategorija, un tos bieži izmanto rotaļlietās un modeļos.
Šajā ķēdē motora barošanas spriegumu maina, izmantojot impulsa platuma modulāciju (PWM), kas nodrošina labu efektivitāti, kā arī relatīvi lielu griezes momentu pie maziem motora apgriezieniem. Viens vadības spriegums starp 0 un +10 V ļauj mainīt motora apgriezienus un mainīt no nulles līdz maksimālajam abos virzienos.
Astable multivibratora IC ir iestatīts kā 80 Hz oscilators, un tas nosaka PWM signāla frekvenci. Pašreizējais avots T1 uzlādē Ca. Zāģa zobu spriegums šajā kondensatorā tiek salīdzināts ar vadības spriegumu 1C2, kas PWM signālu izved uz buferi N1-Na vai NPN1. Darlingtonā bāzētais motora vadītājs ir tilta ķēde, kas spēj vadīt slodzi līdz 4 ampēriem, ja ieejas strāva paliek zemāka par 5 ampēriem, un strāvas tranzistoriem T1 -T tiek nodrošināta pietiekama dzesēšana. Diodes D1, D5 nodrošina aizsardzību pret induktīviem pārspriegumiem no motora. Slēdzis S1 ļauj uzreiz mainīt motora virzienu.

Attēlu prototips



Pāri: Izpratne par pastiprinātāju ķēdēm Nākamais: Kā savienot tranzistorus (BJT) un MOSFET ar Arduino