
Roboti ir automātiskas elektromehāniskas ierīces, kas līdzinās cilvēkiem vai dzīvniekiem un kuras kontrolē ar elektronisku shēmu vai datorprogrammu. Ir dažādi roboti, kuriem tiek izmantoti dažāda veida lietojumprogrammas . Jaunākās robottehnoloģiju tendences ir attīstījušas progresīvus robotus, piemēram, ķirurģiskie roboti ir tālvadības manipulatori, kurus izmanto operācijām (īpaši atslēgas caurumu ķirurģijai), staigāšanas roboti, kas pārsvarā ir daudzkāju un spēj pārvietoties staigājot, mikroboti un nanoboti ir mikroskopiski, un šie nano roboti vai nano ierīces, kuras cilvēka ķermenī izmanto slimību ārstēšanai, roveri ir roboti ar riteņiem, kurus izmanto, lai staigātu pa citām planētām kosmosa izpētei. Parasti kosmosa lietojumos izmantotie roboti ir autonomi roboti , modulāri pārveidojami roboti vai paškonfigurējami moduļu roboti utt.
Modulāri pārkonfigurējami roboti
Modulāri pārkonfigurējami roboti parasti ir autonomas kinemātiskas ierīces ar regulējamu morfoloģiju. Fiksētās morfoloģijas robotos var izpildīt tikai parastos uzdevumus, piemēram, iedarbināšanu, uztveršanu un kontroli. Bet paši pārkonfigurējami roboti vai moduļu pārkonfigurējami roboti spēj mainīt savas formas, pārkārtojot savu daļu savienojamību tā, lai pielāgotos jauniem apstākļiem, veiktu jaunus uzdevumus un atgūtu zaudējumus.

Modulāri pārkonfigurējami roboti
Šos paškonfigurējamos robotus var definēt kā robotus, kas var mainīt savu formu, pamatojoties uz ceļu, kuram viņiem jāiet. Piemēram, ja robotam ir jāiet cauri šaurai caurulei, tad tas pārkonfigurē sevi tārpa formā un, ja tam jāšķērso nelīdzens reljefs, tad tas pārkonfigurē formu ar zirnekli kā kājas. Ja reljefs ir līdzens, tas ātri pārveidosies par bumbu līdzīgu struktūru.
Šie pārkonfigurējamie roboti atkal tiek klasificēti divos veidos, pamatojoties uz dizainu. Piemēram, viendabīgas modulāras robotu sistēmas sastāv no vairāki moduļi ar līdzīgu dizainu, lai izveidotu struktūru tā, lai veiktu nepieciešamo uzdevumu. Heterogēna modulāra robotizēta sistēma sastāv no vairākiem moduļiem ar atšķirīgu dizainu, no kuriem katrs veic noteiktas funkcijas, un tos izmanto, lai izveidotu struktūru, kas veic nepieciešamo uzdevumu.
Pārkonfigurējami roboti kosmosa lietojumprogrammās
Veicot pētījumu par citām planētām, daudzas valstis bieži uzsāk vairākus satelītus vai kosmosa misijas, lai izpētītu planētu apstākļus un īpašības. Tādējādi ilgtermiņa datu iegūšanai tiek uzsāktas ilgtermiņa kosmosa misijas, un šīs ilgtermiņa kosmosa misijas parasti ir paškonfigurējamas sistēmas.
Šie paškonfigurējamie roboti spēj rīkoties neparedzētās situācijās un pašremontu jebkādu bojājumu gadījumā. Mēs zinām, ka kosmosa misijas ir milzīgas un masu ierobežotas, tāpēc ieguvējs ir tas, ja izmantojam paškonfigurējamus robotus, kas var veikt vairākus uzdevumus, nevis vairāki roboti ka katrs veic tikai vienu noteiktu uzdevumu.

Roboti, ko izmanto kosmosa lietojumos
Līdz šim cilvēki ir spēruši kāju, izņemot to, ka planēta Zeme ir tikai mēness. Tā kā kosmosa lietojumos izmantotie moduļu roboti tiek palaisti uz daudzām citām planētām. Uz Marsa nosūtīto desantu, manipulatoru, orbītu un roveru sērija ir slaveni roboti, ko izmanto kosmosa lietojumprogrammās.
Robotu manipulatori un Roveri
Ir dažādi uzdevumu veidi, kurus kosmosā veic šarnīrveida roboti. Aparātu vai iekārtu apkalpošanu kosmosā sauc par manipulācijām ar kosmosu, ko veic šarnīrveida roboti. Polybot labi piemērots kosmosa staciju vai satelītu apkopei un pārbaudei. Robotu manipulatori tiek projicēti pozicionēšanai kosmosā vai uz citām planētām, lai atdarinātu cilvēku manipulācijas spējas. Parasti paraugu iegūšanai tie tiek izvietoti uz brīvā lidojuma kosmosa kuģiem vai uz citu kosmosa kuģu orbītā esošajiem kosmosa transportlīdzekļiem, planētu desantiem un roveriem.

Robotu manipulators
Tiek plānots, ka robotizētie roveri tiek izvietoti uz planētām, lai atdarinātu cilvēka kustību spējas. Tos bieži novieto uz sauszemes planētu virsmām, mazām Saules sistēmas , aeroboti (planētu atmosfēra), hidroboti (ledus slāņi) un hidroboti (šķidrie slāņi).
Automatizēta projektēšana un optimizācija
Modulāri pārkonfigurējami roboti vai modulāra robotu sistēma ir apvienota ar programmatūras rīkiem, kas palīdz izvēlēties un noformēt vislabāko morfoloģiju un vadības struktūru katra konkrētā uzdevuma veikšanai. Lai gan daudzas šī dizaina iezīmes prognozējamā nākotnē neizbēgami būs atkarīgas no cilvēka inteliģences, citas pazīmes piekrīt automatizētai projektēšanai un optimizācijai. Visi kosmosa lietojumos izmantotie pārkonfigurējamie roboti ir jāprojektē tā, lai spētu izdzīvot ar palaišanas spriegumiem, starojumu telpā, vakuumu, planētu izplatību un planētas vidi (planēta, uz kuras tiek izmantoti pārkonfigurējami roboti, vai uz mērķplanētām).
Ir divu veidu pārkonfigurējami roboti, un tie ir: režģi un ķēdes dizaini.

Uz režģa balstīti vīriešu pārkonfigurējama robota modeļi
Režģa konstrukcijās pārkonfigurēšana ir vienkārša, taču ir grūti radīt kustību, un šim dizainam ir nepieciešams vairāk savienotāju un izpildmehānismu.

Konfigurējama robota modeļi, kas balstīti uz ķēdi
Ķēdēs balstītās konstrukcijās pārkonfigurēšana ir grūta un nepietiekama stingrība, taču to ir viegli radīt kustību.
Modulāra pārkonfigurējama robotu simulācija
Izmantojot C ++, tika izstrādāta uz fizikas balstīta programmatūras simulācijas vide, kas lietotājiem atvieglo pārkonfigurējamu robotu konstruēšanu, izmantojot dažāda veida moduļus. Simulācijas paplašināšanai tiek pievienoti papildu moduļu veidi ar saderīgiem savienotājiem.
Paškonfigurējama modulārā robota praktiskais piemērs

Moduļu transformatoru modulis
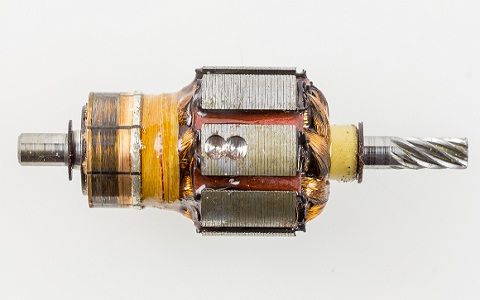
Moduļu transformators ir viens no bieži izmantotajiem pārkonfigurējamiem robotiem, un šie M-TRAN moduļi tiek izmantoti, lai izveidotu 3D struktūru (kas var mainīt savu konfigurāciju un spēj radīt arī mazus robotus), multi-DOF robotu (kas elastīgi lokomotīves), un metamorfējošs robots. Šis modulārais transformators sastāv no diviem izpildmehānismiem un akumulatora.

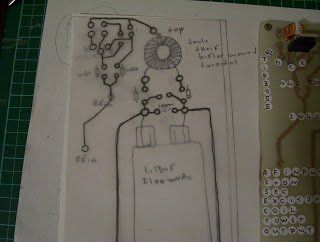
M-TRAN moduļa iekšējā shēma
M-TRAN moduļa iekšējā blokshēma sastāv no litija jonu akumulatora, nelineāras atsperes, barošanas ķēdes, galvenā centrālā procesora, paātrinājuma sensora, pastāvīgā magnēta, SMA spoles, savienojošās plāksnes un PIC.
Šie pārkonfigurējamie roboti tiek izmantoti kosmosa lietojumos, lai sasniegtu konkrētus mērķus, piemēram, telekomunikāciju nodrošināšana, novērošana virs zemes datu atgriešanai, militārā iespējamība un navigācijas nolūkos .
Ir daudz citu uz robotiem balstītu projektu un lietojumprogrammu:
- Ultraskaņas Ar šķēršļiem uztverams robotizēts transportlīdzeklis
- Robotu transportlīdzekļu kustība pa mobilo tālruni
- Robotu transportlīdzeklis, ko vada televizora tālvadības pults
- Trases sensora robotu transportlīdzekļu kustība
- Ugunsdzēsības robots
- Balss vadāms robotizēts transportlīdzeklis
- Izvēlieties robotu N Place Pārvalda Android bezvadu režīmā
- Metāla detektora robots transportlīdzeklis
- Auto metro vilciens uz autobusu starp stacijām
- RF vadāms robotizēts transportlīdzeklis
- Skārienekrāna bāzes tālvadības robotizēts transportlīdzeklis
Ceru, ka šajā rakstā sniegta īsa informācija par moduļu pārkonfigurējamiem robotiem, kurus izmanto kosmosa lietojumprogrammās. Lai iegūtu vairāk informācijas par robotizēti elektronikas projekti jūs varat vērsties pie mums, ievietojot savus jautājumus zemāk esošajā komentāru sadaļā.
Fotoattēlu kredīti
- Modulāri pārkonfigurējami roboti asmedigitalcollection
- Roboti, kurus izmanto kosmosa lietojumprogrammās robotnor
- Robotu manipulators ikrobrobotika
- Uz režģa balstīti vīriešu pārkonfigurējamo robotu modeļi csail.mit
- Pārveidojamā robota uz ķēdes balstītie modeļi wikimedia
- Moduļu transformatoru modulis vienība.jostasvieta
- M-TRAN moduļa iekšējā diagramma slidesharecdn






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}