Elektromehānisko ierīci vai mašīnu, ko izmanto dažādiem mērķiem un ko vada un vada ar programmēšanas paņēmienu palīdzību, sauc par robotu. Roboti ir dažāda veida, pamatojoties uz to lietojumprogrammām, piemēram, industriālie roboti , militārie roboti, kosmosa roboti, vietējie roboti, staigājošie roboti, kāpšanas roboti utt. Visattīstītākais robotikas projekti tiek izstrādāti efektīvai izmantošanai dažādās jomās vairākām lietojumprogrammām. Šajā rakstā apspriedīsim īpašu robotikas projektu veidu, proti, līnijas sekošanu robotizētam transportlīdzeklim ar staigāšanas un kāpšanas mehānismu.
Robotu transportlīdzeklis

Robotikas projekti inženierzinātņu studentiem
The robotu transportlīdzekļi ir īpaša veida mašīnas, kas paredzētas autonomai pārvietošanai uz zemes, gaisā, zem ūdens un kosmosā bez cilvēka uz klāja. Šos robotu transportlīdzekļus vada un vada dažādi sensori balstītas vadības sistēmas. Robotu transportlīdzekļi ir īpaši izstrādāti lietošanai apstākļos, kad cilvēki nespēj iekļūt, piemēram, ugunsnelaimēs, ļoti augstā vai ļoti zemā temperatūrā utt.
Līnijas sekotāja robots

Līnijas sekotāja robots
Robotu transportlīdzekli, kas pārvietojas, braucot pa noteiktu ceļu vai līniju, var nosaukt par a līnijas sekotāja robots . Šie līnijas sekotāju roboti tiek īpaši izmantoti rūpnieciskām vajadzībām īpašiem mērķiem, piemēram, dažādu detaļu vai mašīnu vai transportlīdzekļu (automašīnu, velosipēdu utt.) Pārvadāšanai, sekojot konkrētajai līnijai no viena punkta (ģeneratora) uz citu punktu (montāžas vienība). .
Parastā līnija pēc robotizēta transportlīdzekļa ar īpašām iezīmēm, piemēram, staigāšanas un kāpšanas mehānismu, ir viena no interesanti robotikas projekti inženierzinātņu studentiem , kuru var izmantot vairākām lietojumprogrammām. Zemāk ir parādīti vienkārši soļi, lai izveidotu robota līnijas sekotāju ar kāpšanas un kāpšanas mehānismu.
1. darbība: nepieciešamo komponentu apkopošana

Elektriskās un elektroniskās sastāvdaļas
Komponenti, kas nepieciešami projektēšanas līnijai pēc robotizēta transportlīdzekļa ar staigāšanas un kāpšanas mehānismu, jānovērtē, pamatojoties uz robota pielietojumu. Apkopojiet visus elektriskos un elektroniskos komponentus, piemēram, rezistorus, kondensatorus, infrasarkano staru raidītājus, līdzstrāvas motorus, tranzistorus, robotu korpusu un fotodiodes ar atbilstošu nominālu, kā arī citas daļas, piemēram, kartonu, bultskrūves, uzgriežņus, alumīnija sloksnes utt.
2. solis: Līnijas sekotāja robota ķēdes analīze

Līnija, kas seko robotizētajam transportlīdzeklim, kas ir paplašināms līdz staigāšanas un kāpšanas robotu bloku shēmai
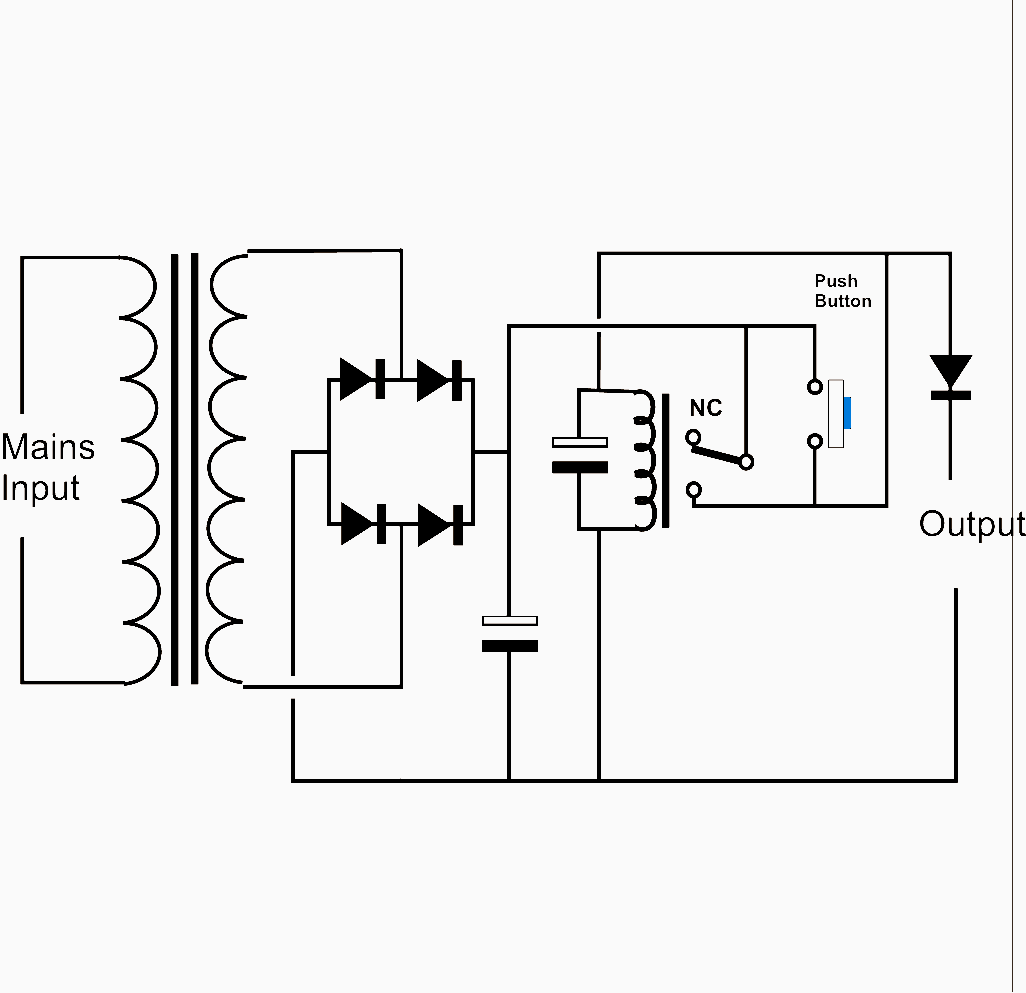
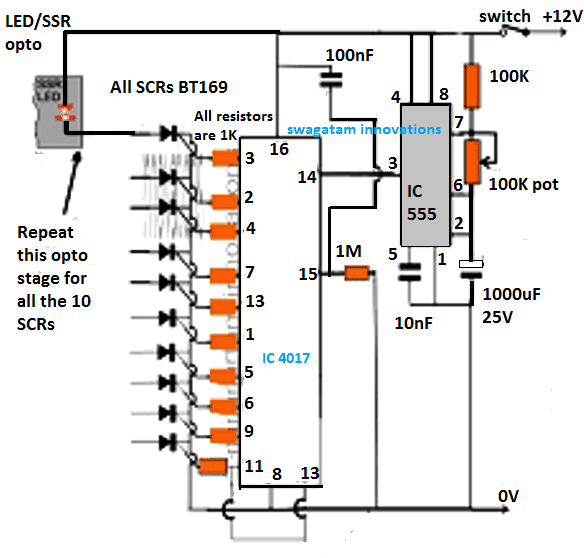
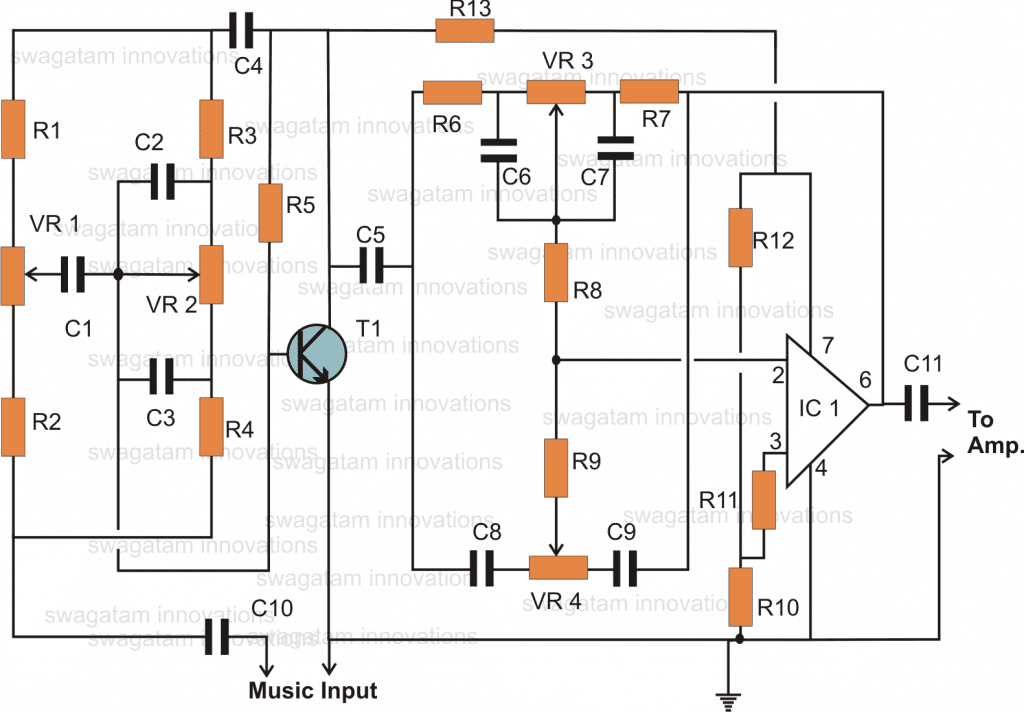
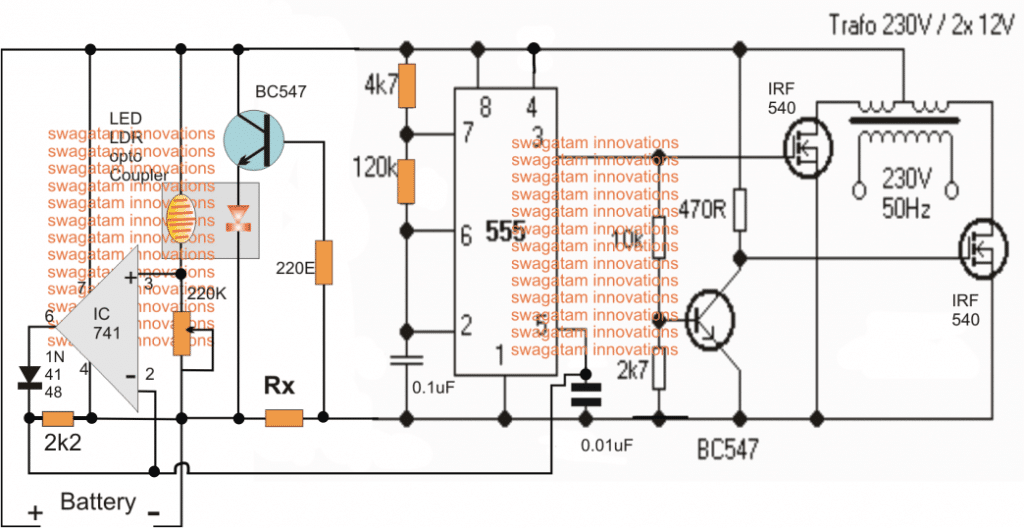
Galvenokārt noformējiet projekta shēmu blokshēmu ar dažādiem blokiem, piemēram, a barošanas bloks , IR LED un fotodiodu bloki un tā tālāk. Pēc komponentu apkopošanas analizējiet ķēdes dizainu, pamatojoties uz dažādu izmantoto komponentu darbību. Pēc tam ievietojiet komponentus virs lodēšanas paneļa, kā norādīts shēmā, izmantojot savienojošos vadus, lai pārbaudītu ķēdi, pirms ķēdes montāžas uz PCB. Pārbaudot ķēdi bez lodēšanas paneļa, ja ir nepieciešamas izmaiņas ķēdē vai sastāvdaļu vērtējumā, tad pārmaiņas var izdarīt viegli, netērējot naudu un laiku, nomainot komponentus vai mainot ķēdes dizainu.
3. solis: komponentu montāža un lodēšana

Līnija pēc robotizēta transportlīdzekļa, kas ir paplašināms līdz staigāšanas un kāpšanas robotu projektam
Tādējādi pēc ķēdes konstrukcijas analīzes salieciet komponentus saskaņā ar shēmas shēmu virs PCB. Pēc tam pielodējiet ķēdi, izmantojot lodēšanas pistoli un lodēšanas stiepli, ievērojot pareizās lodēšanas vadlīnijas. Pareizi savienojiet visas robota daļas, lai izveidotu līnijas sekotāja robotu, kā parādīts iepriekš redzamajā attēlā, un, ja nepieciešams, pielīmējiet robota transportlīdzekļa daļas.
4. solis: Līnijas sekotāja robota darbība
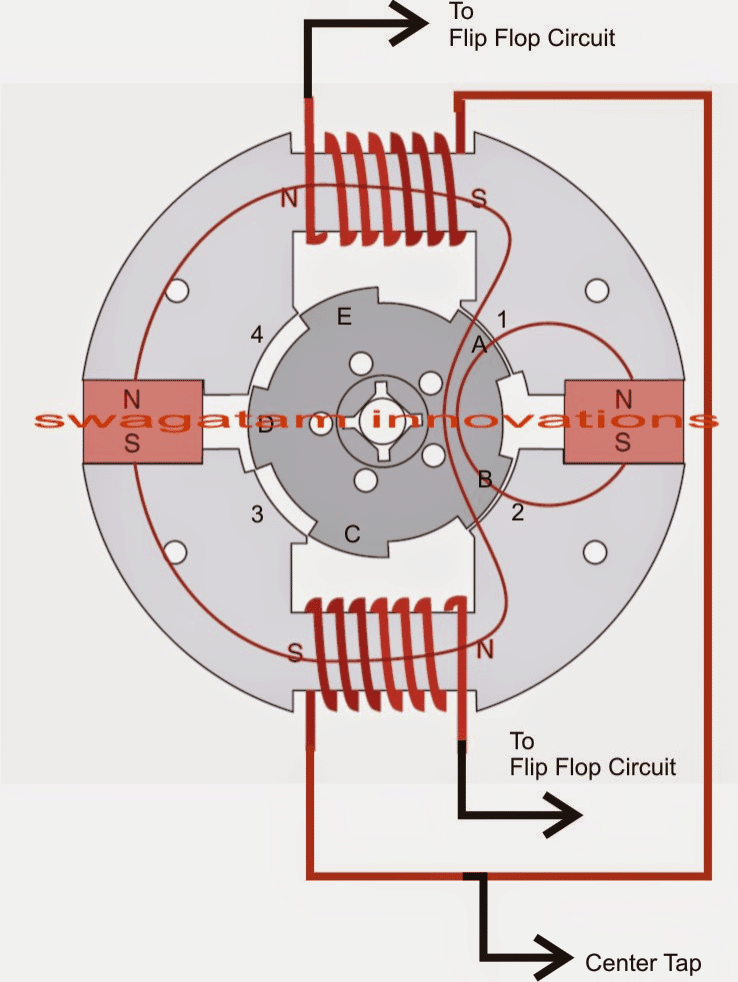
IR raidītājs un fotodiods tiek izmantoti kā a fotosensors pāris, ko var izmantot, lai noteiktu norādīto ceļu līnijas sekotāja robota kustībai, ejot un kāpjot pa sienām. Fotosensoru pāris dod atbilstošus signālus, lai pārslēgtu tranzistorus līnijas sekotāja robota motoru vadīšanai.
5. solis: līnijas sekotāja robotizēts transportlīdzeklis ar staigāšanas un kāpšanas mehānismu
Ir daudz robotikas projekti inženierzinātņu studentiem kurā līnijas sekotājs robotizēts transportlīdzeklis ar staigāšanas un kāpšanas mehānismu ir novatorisks un interesants projekts, ko izstrādāt patstāvīgi, izmantojot mūsu bezmaksas e-grāmatu elektronikas projektu izstrādei.
The robotikas pielietošana mūsu ikdienas dzīvē strauji pieaug vairākām funkcijām, piemēram, rūpnieciskām vajadzībām - smagu izstrādājumu pārvietošana vai pacelšana, transportēšana ierobežotā teritorijā, sekojot noteiktam ceļam, apstrāde, metināšana, sadzīves tehnika, autonomie roboti, militārie roboti cilvēku skaita samazināšanai iesaistīšanās un briesmas, sadarbības roboti mijiedarbībai ar cilvēkiem, piemēram, vairāku uzdevumu veikšanai, izglītības roboti, mobilie roboti un humanoīdi.
Vai jūs interesē projektēšana elektronikas projekti pats par sevi? Vai jūs zināt, kā attīstīt humanoīdos robotus? Ja vēlaties uzzināt vairāk par robotikas projektiem inženierzinātņu studentiem, pēc jebkādas tehniskās palīdzības varat ievietot savus jautājumus, komentārus, idejas un ieteikumus zemāk esošajā komentāru sadaļā.