Šajā laikmetā rūpnieciskā automatizācija , roboti tiek izmantoti dažādu procesu apstrādei, lai iegūtu precīzu un labāku ražošanas kvalitāti. Ideāla motora izvēle ideālam robotam vienmēr ir grūts uzdevums, vienlaikus projektējot robotu īpaši nozarēm. Pareiza elektromotori rūpnieciskajos robotos ir nepieciešami vairāki parametri, lai ņemtu vērā roku vadību, pozīciju, leņķiskās un lineārās kustības.

Rūpnieciskajā robotikā izmantotie motori
Motora izvēle ir vismazāk saprotams jēdziens robotikas hobijiem, kuriem nepieciešama stratēģija un nopietna analīze. Tas ietver robota ātruma, paātrinājuma, griezes momenta prasību noteikšanu, pamatojoties uz robota svaru, riteņa izmēru un pielietojumu, kur tas jāievieš. Ir daudz veidu motoru ir pieejami mūsdienu tirgū, bet galvenokārt Tiny peidžeru motori, servomotori , lineārie motori, stepper motori un līdzstrāvas motori tiek izmantoti rūpnieciskajos robotos atbilstoši to izmantošanas jomai.
Nepareiza motora izvēle galu galā ir robots ar invaliditāti. Tātad, kāda veida motors ir labākais un piemērots, lai rūpnieciskos robotus padarītu reālus, precīzus un pietiekamus, lai apmierinātu visas rūpnieciskā procesa vajadzības, paturot prātā visas reālistiskās specifikācijas?
Šeit mēs apkopojām dažus ieskatus par šo motoru no rūpniecības profesionāļiem, lai izvēlētos atbilstošo motoru, kas jāizvēlas rūpnieciskām vajadzībām.
Mēs iesakām sekot ekspertu atzinumiem, kuru mērķis ir nodrošināt labākos rūpnieciskās robotikas motorus ar pieejamajiem līdzstrāvas, pakāpju, bezkontakta un servomotoriem precīzām, rentablām un uzticamām robota kustībām.
Ch.Sampath Kumar
M. tehnika VLSI dizainā
Tehniskā satura autors
 Līdzstrāvas motori ir pieejami plašā diapazonā nepārtrauktai darbībai, taču tam ir nepieciešami pārnesumu samazinājumi, lai tie atbilstu attiecīgajam pielietojumam. Stepper motoram nav nepieciešams samazināt pārnesumu skaitu, jo tā pakāpeniskā darbība nodrošina mazu ātrumu noteiktām vajadzībām. Visbeidzot, servomotori tiek izmantoti precīzai un precīzai kontrolei, kas tiek īstenota slēgtās cilpas operācijās. Bet tas prasa papildu atsauksmes un braukšanas shēmas, tāpēc tas ir dārgs nekā līdzstrāvas un pakāpju motors. Tātad servomotori padara robotu uzticamāku precīzas kustības dēļ.
Līdzstrāvas motori ir pieejami plašā diapazonā nepārtrauktai darbībai, taču tam ir nepieciešami pārnesumu samazinājumi, lai tie atbilstu attiecīgajam pielietojumam. Stepper motoram nav nepieciešams samazināt pārnesumu skaitu, jo tā pakāpeniskā darbība nodrošina mazu ātrumu noteiktām vajadzībām. Visbeidzot, servomotori tiek izmantoti precīzai un precīzai kontrolei, kas tiek īstenota slēgtās cilpas operācijās. Bet tas prasa papildu atsauksmes un braukšanas shēmas, tāpēc tas ir dārgs nekā līdzstrāvas un pakāpju motors. Tātad servomotori padara robotu uzticamāku precīzas kustības dēļ.
Viswanath Prathap
M.Tech elektrotehnikā
Tehniskā satura autors

Izvēlieties un novietojiet robotus parasti atrodami nozarēs, lai izvēlētos objektu no vienas pozīcijas vai vietas un novietotu to citā pozīcijā vai vietā. Šim nolūkam ir jākontrolē robotu locītavu leņķiskās kustības, kuras var panākt, izmantojot servomotorus. Šie servomotori tiek vadīti, izmantojot robotu savienotāju iedarbināšanai robotizētā kontroliera sniegtos PWM datus. Servomotori spēj radīt pietiekami lielu griezes momentu, lai objektu ātri pārvietotu no apstāšanās stāvokļa. Tādējādi tos izmanto kā riteņus militārajos un rūpnieciskajos robotu transportlīdzekļos. Stepper motorus var izmantot arī stāvokļa kontrolei, taču tie pat atpūtas laikā patērēs enerģiju, lai tikai bloķētu un noturētu komandēto pozīciju. Tātad servomotorus parasti izmanto rūpnieciskajā robotikā kā augstas veiktspējas pakāpienu motoru aizstājēju.
S. Narešs Redijs
M.tech iegultā sistēmā
Projekta ceļvedis
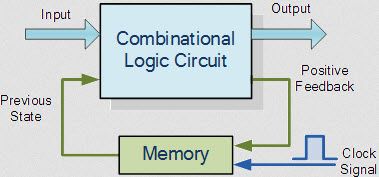
Mehāniskā robota struktūra ir jākontrolē līdz perfo  rm uzdevums. Robota kontrolei ir trīs dažādas fāzes, piemēram, uztvere, apstrāde un darbība. Sensori sniedz robotam informāciju par tā savienojumu stāvokli un gala efektoru, pēc tam šī informācija tiek apstrādāta vadības blokā un aprēķina atbilstošo signālu motoram, kas kustas mehāniski. Lielākā daļa robotu izmanto elektromotorus. Portatīvajos robotos tiek izmantoti atkārtoti bezkontaktu un matēti līdzstrāvas motori, bet rūpnieciskajos robotos - maiņstrāvas motori. Šie motori ir vēlami sistēmās ar vieglākām slodzēm un kur dominējošā kustības forma ir rotējoša.
rm uzdevums. Robota kontrolei ir trīs dažādas fāzes, piemēram, uztvere, apstrāde un darbība. Sensori sniedz robotam informāciju par tā savienojumu stāvokli un gala efektoru, pēc tam šī informācija tiek apstrādāta vadības blokā un aprēķina atbilstošo signālu motoram, kas kustas mehāniski. Lielākā daļa robotu izmanto elektromotorus. Portatīvajos robotos tiek izmantoti atkārtoti bezkontaktu un matēti līdzstrāvas motori, bet rūpnieciskajos robotos - maiņstrāvas motori. Šie motori ir vēlami sistēmās ar vieglākām slodzēm un kur dominējošā kustības forma ir rotējoša.
Surešs Megadži
M. tehn. Bezvadu sakaru sistēmās
Tehniskā satura autors

Ja vēlaties iesaistīties “robotikā” un to pielietojumā “rūpniecībā”, jāzina par robotiem izmantotajiem “motoriem”, jo robotika galvenokārt ir atkarīga no motoriem. Būtībā “robotizētas mašīnas” tiek izmantotas dažādām ražošanas vajadzībām. Dažādi ‘motori’, piemēram, līdzstrāvas, impulsa, soļu, optiskā piedziņa, daļēja pagrieziena un zāles efekta motori utt. ... tiek izmantoti ar dažām metodēm, lai tos pielietotu nozarē un padarītu tos draudzīgus, piemēram,
- Līdzstrāvas motori tiek izmantoti akumulatoriem orientētām lietojumprogrammām, lēnākam ātrumam, mobilitātes lietojumiem.
- Visur, kur mums ir nepieciešama uz rotāciju orientēta lietojumprogramma, mēs varam izmantot Stepper motorus, piemēram, vienpolārus un bipolārus motorus.
- Galvas un roku kustībām mēs varam izmantot daļēja pagrieziena motorus.
- Ja mēs vēlamies izmantot magnētiskos laukus, mēs varam izmantot Hall Effect un optisko disku motorus utt.
Izmantojot robotiku, kas izmanto viedos motorus, mēs varam ietaupīt naudu, laiku, vietu, bīstamas kustības utt.
Ajay Sahare
Mārketinga vadītājs

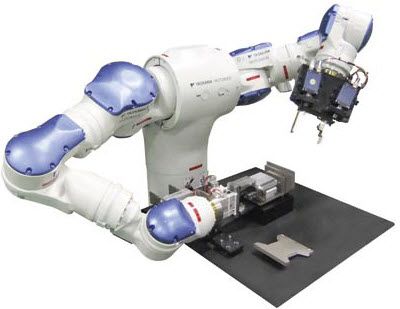
Rūpnieciskos robotus izmanto rūpnieciskās ražošanas vidē. Tās ir rokas, kas īpaši izstrādātas tādām vajadzībām kā metināšana, materiālu apstrāde, krāsošana un citas.
Ne katru mehatronisko ierīci, ko izmanto rūpnieciskajā vidē, nevar uzskatīt par robotu. Kā definējis ISO (Starptautiskā standartu organizācija), automātiski vadāms, pārprogrammējams, daudzfunkcionāls manipulators, kas programmējams trīs vai vairāk asīs, tiek uzskatīts par rūpniecisko robotu.
Rūpnieciskajā robotikā izmantotie motori ir
- Maiņstrāvas (maiņstrāvas) motori
- Līdzstrāvas (līdzstrāvas) motori
- Servo Motors
- Stepper Motors.
1. Maiņstrāvas motorus var sīkāk sadalīt asinhronajos un sinhronajos tipos. Piemēram, asinhronais asinhronais motors ir asinhrona tipa iekārta, kas būtībā sastāv no stieples uztīta statora un rotora. Jauda ir savienota ar vadu, un caur to plūstošā maiņstrāva inducē elektromagnētisko (EM) lauku tinumā, ar pietiekami spēcīgu lauku, kas nodrošina spēku rotora kustībai. Sinhronie motori ir nemainīga ātruma motori, kas darbojas sinhroni ar maiņstrāvas līnijas frekvenci un parasti tiek izmantoti, ja nepieciešams precīzs nemainīgs ātrums.
2. Daudzos rūpnieciskos lietojumos, ieskaitot robotiku, līdzstrāvas motorus bieži izmanto, jo ir viegli kontrolēt ātrumu un virzienu. Viņi spēj bezgalīgi ātruma diapazonā, sākot no pilna ātruma līdz nullei, ar plašu slodžu diapazonu.
Tā kā līdzstrāvas motoriem ir liela griezes momenta un inerces attiecība, tie var ātri reaģēt uz izmaiņām vadības signālos. Līdzstrāvas motoru var vienmērīgi kontrolēt līdz nullei un uzreiz paātrināt pretējā virzienā, neizmantojot sarežģītas jaudas pārslēgšanas shēmas. Pastāvīgā magnēta bezkontakta līdzstrāvas motori parasti ir dārgāki nekā suku veidi, lai gan tie var nodrošināt enerģijas patēriņa un uzticamības priekšrocības.
Bez komutatora bezkontaktu motori var darboties efektīvāk un ar lielāku ātrumu nekā parastie līdzstrāvas motori. Lielākā daļa bezkontakta līdzstrāvas motoru darbojas uz trapecveida maiņstrāvas viļņu formas, bet daži no motoriem darbojas ar sinusoidālajiem viļņiem. Ar sinusa viļņu darbināmiem bezkontaktu motoriem vienmērīgu darbību var panākt ar mazāku ātrumu ar zemu griezes momenta viļņošanos, padarot tos ideāli piemērotus slīpēšanai, pārklāšanai un citām vajadzībām, piemēram, virsmas apdarei.
Ja vēlaties, lai DC motori būtu ar suku, ja vēlaties, lai motors grieztos lēnāk, nezaudējot jaudu, varat izmantot impulsa platuma modulāciju (PWM). Tas būtībā nozīmē ļoti ātru motora ieslēgšanu un izslēgšanu. Tādā veidā motors griežas ar mazāku ātrumu, it kā tiktu izmantots zemāks spriegums, nerūpējoties par jaudu.
Būtībā griezes moments, ko rada slīpēts līdzstrāvas motors, ir pārāk mazs, un ātrums ir pārāk liels, lai tas būtu noderīgs. Tātad ātruma samazināšanai un griezes momenta palielināšanai parasti tiek izmantoti pārnesumu samazinājumi.
3. Servomotorus izmanto slēgta cikla sistēmās ar digitālo kontrolieri. Kontrolieris nosūta ātruma komandas vadītāja pastiprinātājam, kas savukārt baro servomotoru. Kaut kāda veida atgriezeniskās saites ierīce, piemēram, izšķirtspēja vai kodētājs, sniedz informāciju par servomotora stāvokli un ātrumu. Risinātājs vai kodētājs var būt integrēts motorā vai atrasts attālināti. Slēgtas cilpas sistēmas dēļ servomotors var darboties ar noteiktu kustības profilu, kas ieprogrammēts kontrolierī.
4. Stepper motori var darboties ar atgriezenisko saiti vai bez tā, ar motora rotāciju sadalot mazos leņķa pakāpienos. To kontrolē pulsējoši vadības signāli, un tas var precīzi apstāties komandētajā vietā, neizmantojot bremzes vai sajūga mezglus. Kad strāva tiek pārtraukta, pastāvīgā magnēta pakāpienu motors parasti paliek pēdējā pozīcijā. Vairākus soļu motorus var uzturēt sinhronizācijā, virzot tos no kopēja avota.
Dev desai
Mārketinga vadītājs 
Ja plānojat iesaistīties robotikā, jums būs jāiepazīstas ar daudziem pieejamo motoru veidiem. Visa robotikas kustība vienā vai otrā veidā tiek motorizēta, tāpēc ir svarīgi zināt, kāda ir jūsu iespēja.
DC motori
Līdzstrāvas motora kustības virzienu nosaka ne tikai akumulatora darbība, bet arī barošanas avota polaritāte. Tas ir absolūti nepieciešams robotu funkcijām. Par laimi, šāda veida motoriem ir visdažādākie izmēri, sprieguma prasības un tas ir pieejams visur.
Dažādu veidu motori ir šādi
- Mobilitātes bāzes motors
- Ātrgaitas hobija motors
- Jostas piedziņas motors
- Spēļu automotors
- Pulss darbojas
- Ar roku pielāgots motors
- Bipolārs steperis ar rādītāju
Bio motors
Bio-metāls ir pārsteidzoša viela, kas pastāv jau dažus gadus, un tai ir daudz pielietojumu robotikas jomā. Ilustrācijā redzams, ka bio-metāla stieples gabals samazināsies par pieciem procentiem no tā garuma, ja tam tiek uzlikti tikai daži volti. Pēc vairāku gadu testēšanas bioloģiskais vads ir izrādījies spēcīgs, uzticams un kļūst arvien noderīgāks, jo parādās jauni produkti. Tā nedaudz lēnākais reakcijas laiks padara to ideāli piemērotu robotu rokām un rokām, kur saraustīšanās būtu problemātiska. Garš stieples gabals var radīt ievērojamu kustību, ja tas ir izstiepts visā robotizētās rokas garumā. Patlaban komerciālajā tirgū ir robotu roku komplekti, kuros tiek izmantots bio metāls.
Releji
Robotikas releju gandrīz vienmēr izmanto, lai izolētu motoriem paredzēto jaudu no datora funkciju barošanas avota. Motori savas zemās pretestības dēļ rada lielas strāvas prasības strāvas avotiem un rada vairākus traucējumus, kurus datori nevar pieļaut. Tāpēc tikai motoriem ir ieteicams izmantot atsevišķu lielas strāvas avotu.
Solenoīdi
Solenoīdus vislabāk izmantot kā manipulatora vadības ierīces vai slēdžu operatorus. Viņu kustība ir ātra un spēcīga, tāpēc atsperes gandrīz vienmēr tiek izmantotas graspers, lai mīkstinātu darbību. Kā redzams attēlā, stiprinājuma aizvēršanai tiek izmantoti vadības vadi. Šie vadības vadi var darboties arī kā atgriezeniskās atsperes. Šādi grasperi ir vairāk atrodami ražošanas līnijas darbā, kur uzdevums ir ļoti izmērīts un aptver šaurus parametrus.
Sekundārās funkcijas
Lielākā daļa motora funkciju ir saistītas ar kustīgumu, roku, galvu vai kādu citu redzamu ārēju kustību, tomēr dažas motora kustības nav tik redzamas. Lielie rūpnieciskie roboti izmanto hidrauliskās sistēmas, kas izmanto sūkņu motorus, lai radītu hidrauliskā šķidruma darba spiedienu. Vēl viena svarīga motoru sekundārā funkcija ir kontrolēta regulēšana. Lai uzlabotu precizitāti, potenciometri, kas ir saskarnē ar motoriem, parasti ir vairāku pagriezienu ierīces.
Secinājums
Roboti var būt ļoti sarežģītas ierīces, kurām nepieciešamas dažādas motorizētas kustības. Šis raksts ir paredzēts, lai sniegtu pārskatu par ierīču klāstu, ar kurām jūs, iespējams, nodarbojaties kā robotu veidotājs. Būtu ieteicams sākt ar robotizētu iekārtu piegādātāju un pieejamo krājumu izpēti. Šobrīd ir pieejams liels daudzums produktu, un internets ļauj to viegli atrast, uzzināt un lietot. Lai kādas būtu jūsu vajadzības, nelielai atjautībai un apņēmībai, kas, šķiet, ir visiem robotu izgatavotājiem, jums vajadzētu labi kalpot.
Samadans Vandre
Mārketinga vadītājs
“Robotikā izmantotie motori”
- Mobilitātes bāzes motors

- Ātrgaitas hobija motors
- Jostas piedziņas motors
- Spēļu automotors
- Pulss darbojas
- Ar roku pielāgots motors
- Bipolārs steperis ar rādītāju

Lielāki motori ir vislabāk piemēroti pārvietošanās bāzēm, kas ļauj robotiem manevrēt reljefu. Daži no šiem motoriem ir aprīkoti ar pārnesumkārbām, lai nodrošinātu lēnāku kustības ātrumu un griezes momentu. Sprieguma pazemināšana līdz motoram var arī palēnināt to vēlamākā ātrumā. Tikai eksperimentējot var noteikt, vai jūsu motors darbosies ar zemāku spriegumu. Ja tā notiek, jūs esat sev ietaupījis daudz problēmu, ja nē, ir arī citi veidi, kā palēnināt motorus. Dažus ātrgaitas motorus var izmantot, ja tiek izmantoti tārpu vai skrūvju pārnesumi.
Skrūves pārnesuma piemērs ir redzams robotizētās rokas attēlā. Kad motors pagriežas pulksteņrādītāja kustības virzienā, skrūves mezgls tiek pievilkts pie motora un roka saraujas un, pagriežoties pretēji pulksteņrādītāja virzienam, roka izstiepjas. Lai gan motora vārpsta ātri pagriežas, skrūves samazināšanas dēļ rokas darbība ir ievērojami lēnāka. Šajā nākamajā motora ķēdes attēlā mēs redzam līdzstrāvas motoru, ko kontrolē jaudas tranzistors. Releja slēdzis (Double Pole Double Throw) nosaka virzienu. Tranzistoram Q1 jābūt jaudas tranzistoram, lai uzņemtu lielu motora slodzi.
Impulsu motori
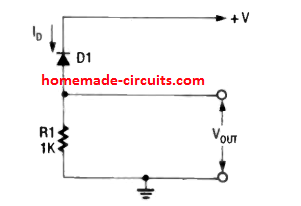
Daži motori iegūst ātruma samazinājumu, darbojoties no impulsa līdzstrāvas signāla. Šis signāls parasti ir aptuveni simts Hz. Motora ātrumu var mainīt, mainot impulsa platumu, nevis mainot impulsa biežumu. Šādus motorus var atrast elektronikas pārpalikumu veikalos, un tos var viegli noteikt pēc tam pievienotā impulsu ģeneratora. Jebkuru līdzstrāvas motoru var vadīt ar impulsa avotu, un ir iekļauta šādas shēmas shēma.
Kā redzat, par piedziņas oscilatoru tika izvēlēts taimeris 555, kura frekvence ir aptuveni 100 Hz. Rezistors R1 un kondensators C stabilizē un izolē impulsu ģeneratoru no motora radītajiem tapas. Tā kā šī ierīce var darboties no 6 līdz 12 voltu barošanas avota, lai iegūtu labākus rezultātus, iespējams, vēlēsities mainīt kondensatora C4 un C6 vērtību atkarībā no izmantotā sprieguma. Impulsu izvade tiek ņemta no IC1 trešās tapas un tiek ievadīta līdz IC2 otrajai tapai, arī 555 taimeris.
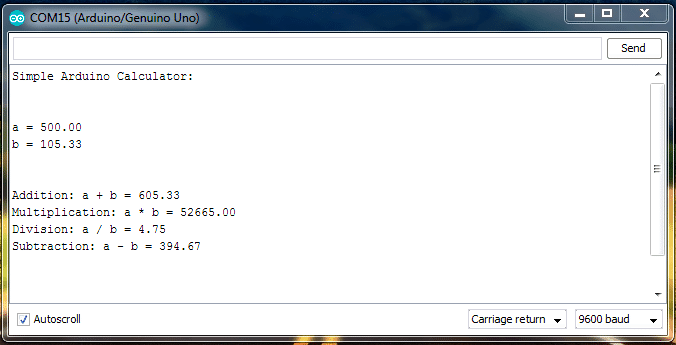
Otrais taimeris maina impulsa platumu, pielāgojot spriegumu, kas tiek padots kondensatoram C6 caur potenciometru R5 un rezistoru R6. Impulsa ilgums ir tas, kas nosaka motora ātrumu, un impulsa platumu var noregulēt no 10% līdz 100%.
Transistors Q1 saņem impulsa platuma modulēto signālu caur rezistoru R7. Tā kā Q1 ir vājas strāvas ierīce, tā nodod signālu Q2 - jaudas tranzistoram, kas spēj apstrādāt motora pašreizējās prasības. Šie tranzistori nav kritiski, un gandrīz jebkura veida strāvas tranzistori darbosies. Relejs noteiks motora virzienu.
Stepper Motors
Vissarežģītākais no visiem motoriem ir pakāpju motors. Tāpat kā nosaukums izriet, motors pagriežas pakāpēs un tiek darbināts ar impulsu. Precīza pagrieziena pakāpe vienā solī var atšķirties atkarībā no ražotāja vai modeļa, taču 20 grādi ir populāri un rada 18 pakāpienus vienam pilnam pagriezienam. Ir divi pamatpakāpju motoru veidi, bipolāri un unipolāri. Kā redzat pakāpju motora shēmā, bipolārs ir vienkārši divu spirāļu darbināms motors.
Unipolārais tips ir divas spoles ar centra krāniem. Ja centrālie krāni tiek ignorēti, vienpola motors var darboties kā bipolārs tips. Divas spoles soli motorā baro pakāpienu impulsus pārmaiņus polaritāti no spoles uz spoli. Darba diagrammā ir sniegta šī procesa karte, lai grafiski attēlotu motora darbību. Atšķirībā no parastajiem līdzstrāvas motoriem griezes moments samazinās līdz ar ātrumu. Lai virzītu soļu motoru, ir nepieciešams arī īpašs piedziņas bloks, un tas jāpiegādā kopā ar motoru. Nav ieteicams veidot vadības bloku, ja vien motors netiek piegādāts ar labu specifikāciju lapu, kurā ir komponentu ieteikumi un pilna shēma.
Var būt nepieciešami buferi, lai to izolētu no piedziņas sistēmas, vai arī tam var būt nepieciešams atsevišķs barošanas avots. Neatkarīgi no vajadzībām, tie var ievērojami atšķirties no viena motora. Hobiju veikali ir visuzticamākie stepper motoru piegādātāji, un, lai arī dažkārt to var būt elektronisko preču pārpalikumos, tajos var nebūt iekļauta nepieciešamā informācija
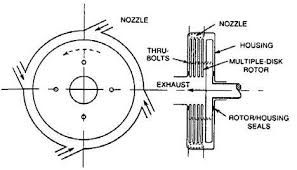
Daļēji pagrieziena motori
Dažām robotu funkcijām ir nepieciešams tikai daļējs pagrieziens, piemēram, galvas vai roku kustības. Vieglākais veids, kā to panākt, ir ar pozīcijas apturēšanu un bīdāmiem pārnesumiem. Šāda veida motora mehānisko detaļu ilustrācija ir sniegta iepriekš. Mikroslēdžus var izmantot kā apturēšanas sensorus, lai izslēgtu strāvu un atjaunotu nākamās darbības virzienu.
Apakšējais ritenis ir savienots ar motoru, bet augšējais ritenis ir atdalīts no apakšējā riteņa ar apļveida filca gabalu. Kad apakšējais ritenis pagriežas, augšējais ritenis pagriežas ar to līdz brīdim, kad pieturas tapas saskaras ar mikroslēdzi. Daži modeļi neparedz motora apturēšanu, tāpēc vienkāršas skrūves ar starplikām darbosies kā motora pieturas.
Bio-Motor
Bio-metāls ir pārsteidzoša viela, kas pastāv jau dažus gadus, un tai ir daudz pielietojumu robotikas jomā. Ilustrācijā redzams, ka bio-metāla stieples gabals samazināsies par pieciem procentiem no tā garuma, ja tam tiek uzlikti tikai daži volti. Pēc vairāku gadu testēšanas bioloģiskais vads ir izrādījies spēcīgs, uzticams un kļūst arvien noderīgāks, jo parādās jauni produkti. Tā nedaudz lēnākais reakcijas laiks padara to ideāli piemērotu robotu rokām un rokām, kur saraustīšanās būtu problemātiska. Garš stieples gabals var radīt ievērojamu kustību, ja tas ir izstiepts visā robotizētās rokas garumā. Patlaban komerciālajā tirgū ir robotu roku komplekti, kuros tiek izmantots bio metāls.
Bhaskars Singhs
Mārketinga vadītājs
 Rūpnieciskie roboti ir ierīces, kas zināmā mērā dublē cilvēka kustību, vienlaikus samazinot briesmas, nodrošinot lielāku izturību, precizitāti un nepārtrauktību. Viņiem ir nepieciešams plašs motorizētu kustību diapazons atkarībā no to darbības režīmiem, vadības, izmantotajiem instrumentiem un veicamā darba. Rūpnieciskajam robotizētajam motoram vajadzētu būt iespējai veikt daudz dažādu pienākumu nekā parastajiem motoriem, lai specializētos konkrētā uzdevumā.
Rūpnieciskie roboti ir ierīces, kas zināmā mērā dublē cilvēka kustību, vienlaikus samazinot briesmas, nodrošinot lielāku izturību, precizitāti un nepārtrauktību. Viņiem ir nepieciešams plašs motorizētu kustību diapazons atkarībā no to darbības režīmiem, vadības, izmantotajiem instrumentiem un veicamā darba. Rūpnieciskajam robotizētajam motoram vajadzētu būt iespējai veikt daudz dažādu pienākumu nekā parastajiem motoriem, lai specializētos konkrētā uzdevumā.
Elektromotori visbiežāk tiek izmantoti rūpnieciskajā robotikā, pateicoties ļoti efektīvai enerģijas iegūšanai un salīdzinoši vienkāršai konstrukcijai, kas padara tos populārākus variantus attiecībā uz izmaksu un veiktspējas novērtējumu visos aspektos - uzstādīšanā, uzturēšanā un apkopē.
Atkarībā no nepieciešamā darba dažādiem mērķiem tiek izmantoti dažādi motori. Piemēram, līdzstrāvas motori tiek izmantoti kustībām pulksteņrādītāja kustības virzienā un pretēji pulksteņrādītāja virzienam, piemēri ir celtņos un pacēlājos, impulsu motori tiek izmantoti impulsu kustību nodrošināšanai, izmantojot līdzstrāvas impulsa platumu, daļēji pagrieziena motori tiek izmantoti, lai nodrošinātu galvas un rokas veida kustības, un vissarežģītākā - stepper motori tiek izmantoti, lai nodrošinātu pakāpeniskus pagriezienus pakāpēs.
Turklāt atkarībā no darba veida dažādiem mērķiem tiek izmantoti motori ar atšķirīgu vērtējumu un izmēru. Atkarībā no darba un robotu konstrukcijas ir vairāki motoru veidi, kuriem katram ir dažādas pielietojuma vietas dažādās vietās.
Mohans Krišna. L
Pārdošanas un atbalsta izpilddirektors
Roboti tiek izmantoti, lai veiktu darbu, ko varētu paveikt cilvēki, un ir daudz iemeslu, kāpēc roboti ir labāki par cilvēkiem. 
Ir divi galvenie robotu veidi:
Mobilais robots: Šī kustība uz kājām vai sliedēm.
Stacionārs robots: Tam ir fiksēta bāze.
Stacionāros robotus parasti robotu ieročus var izmantot, lai paņemtu objektus vai veiktu kādu citu darbu, kas saistīts ar nokļūšanu objektā.
Robotu rokai ir trīs pamatdaļas: -
- Pleca locītava
- Plaukstas locītava
- Fiksēta bāze
Nepieciešams robots
- Spēja strādāt ātri un bīstamā vidē.
- Spēja atkārtot uzdevumus atkal un atkal.
- Spēja precīzi strādāt.
- Spēja veikt dažādus uzdevumus.
- Efektivitāte.
Motors ir ierīce, kas pārveido elektrisko enerģiju par mehānisko enerģiju, t.i., elektromehānisko ierīci. Ir divu veidu motori, piemēram, maiņstrāvas motors un līdzstrāvas motors
Rūpnieciskajā robotikā izmantotais motors ir servomotors. Servomotors ir vienkāršs elektrodzinējs, kuru kontrolē ar servomehānisma palīdzību. Ja vadāmo motoru darbina maiņstrāva, to sauc par maiņstrāvas servomotoru, citādi līdzstrāvas servomotoru. Lielākā daļa servomotoru var pagriezties apmēram 90 līdz 180 grādus. Pat daži rotē cauri pilni 360 grādi vai vairāk. Daži no servomotora pielietojumiem robotikā ir
- Servomotora pielietojums robotizētā ierīcē, t.i., vienkāršs robots, ko izvēlēties un novietot, tiek izmantots, lai izvēlētos objektu no vienas pozīcijas un novietotu objektu dažādās pozīcijās.
- Tiek izmantoti konveijeru servomotori
- rūpnieciskajā vienību ražošanā un montāžā, lai objektu pārvietotu no vienas montāžas stacijas uz otru. Piemēram: - pudeles pildīšanas process.
- Servomotors robotizētā transportlīdzeklī šeit Servo motors, ko izmanto riteņos. Tā kā tiek izmantots nepārtrauktas rotācijas servomotors.
Dinesh.P
Mārketinga vadītājs
 Tiek ieviesti roboti, lai samazinātu cilvēku smago darbu un palīdzētu radīt cilvēkiem veiksmi turpmākajai attīstībai. Termins roboti nozīmē mašīnu, kas atdarina dažādas cilvēka īpašības. Robotika ietver zināšanas par mehāniku, elektroniku, elektrotehniku un datorzinātnēm. Robotos izmantotie motori ir DC Motors, Stepper Motors un Servo Motors
Tiek ieviesti roboti, lai samazinātu cilvēku smago darbu un palīdzētu radīt cilvēkiem veiksmi turpmākajai attīstībai. Termins roboti nozīmē mašīnu, kas atdarina dažādas cilvēka īpašības. Robotika ietver zināšanas par mehāniku, elektroniku, elektrotehniku un datorzinātnēm. Robotos izmantotie motori ir DC Motors, Stepper Motors un Servo Motors
Kur,
- DC motori tiek izmantoti nepārtrauktai rotācijai
- Stepper Motors tiek izmantoti rotācijai dažos grādos
- Servo Motors tiek izmantoti pozicionēšanai, to var izmantot automašīnās un lidmašīnās
Ganešs .J
Mārketinga vadītājs 
Robotus izmanto, lai veiktu darbu, ko varētu paveikt cilvēki, kā arī samazina cilvēka piepūli un laiku, kā arī uzlabo kvalitāti. Rūpnieciskajā robotikā izmantotie motori ir
- Maiņstrāvas (maiņstrāvas) motori
- Līdzstrāvas (līdzstrāvas) motori
- Servo Motors
- Stepper Motors.