

Rūpnieciskā automatizācija un vadība
Mūsdienās rūpnieciskās automatizācijas sistēmas ir kļuvuši populāri daudzās nozarēs, un tiem ir izšķiroša loma vairāku ar procesu saistītu darbību kontrolē. Sakarā ar visdažādāko rūpniecisko tīklu ieviešanu, to ģeogrāfisko sadalījumu pa rūpnīcu vai rūpniecību, grīdas datu pārsūtīšanas un kontroles iespējas ir kļuvušas sarežģītākas un vieglākas, sākot no zema līmeņa līdz augsta līmeņa kontrolei. Šie industriālie tīkli tiek virzīti caur dažādām lauka kopnēm, kas izmanto dažādus sakaru standartus, piemēram, CAN protokolu, Profibus, Modbus, Device net utt. Tāpēc apskatīsim, kā darbojas CAN komunikācija, lai automatizētu nozares un citas automatizācijas sistēmas .
Ievads rūpnieciskajā automatizācijā un vadībā
Zemāk redzamajā attēlā parādīta rūpnieciskās automatizācijas un vadības arhitektūra, kurā visas sistēmas automatizēšanai tiek veikti trīs vadības līmeņi. Šie trīs līmeņi ir vadība un automatizācija, procesu kontrole un augstākas pakāpes kontrole. Vadības un automatizācijas līmeni veido dažādas lauka ierīces, piemēram, sensori un izpildmehānismi, lai uzraudzītu un kontrolētu procesa mainīgos.

Rūpnieciskās automatizācijas arhitektūra
Procesa vadības līmenis ir centrālais kontrolieris, kas ir atbildīgs par vairāku tādu vadības ierīču kā Programmējamie loģiskie kontrolieri (PLC) un arī tādas lietotāja grafiskās saskarnes kā SCADA un Cilvēka un mašīnas saskarne (HMI) ir iekļauti arī šajā līmenī. Augstākais pasūtījumu kontroles līmenis ir uzņēmuma līmenis, kas pārvalda visas ar uzņēmējdarbību saistītās operācijas.
Rūpīgi novērojot iepriekš minēto diagrammu un tās katru līmeni, kā arī starp līmeņus, sakaru kopnes, piemēram, Profibus un rūpnieciskais Ethernet tiek uzskatīti par savienotiem ar informācijas apmaiņu. Tāpēc sakaru kopne ir rūpnieciskās automatizācijas galvenā sastāvdaļa drošai datu pārsūtīšanai starp kontrolieriem, datoriem un arī no lauka ierīcēm.
Vadības apgabala tīkls vai CAN protokols

Atvērto sistēmu starpsavienojuma (OSI) modelis
Datu komunikācija ir datu pārsūtīšana no viena punkta uz otru. Lai atbalstītu rūpniecisko komunikāciju, Starptautiskā standartizācijas organizācija ir izstrādājusi atvērto sistēmu starpsavienojuma (OSI) modeli, lai nodrošinātu datu pārsūtīšanu starp dažādiem mezgliem. Šis OSI protokols un ietvars ir atkarīgs no ražotāja. CAN protokols izmanto septiņus zemākos slāņus, t.i., fizisko un datu saites slāņus no septiņiem OSI modeļa slāņiem.
Vadītāja apgabala tīkls vai CAN protokols ir multi-master sērijveida sakaru kopne , un tas ir neatkarīgu kontrolieru tīkls. Pašreizējā CAN versija ir izmantota kopš 1990. gada, un to izstrādāja Bosch un Intel. Tas pārraida ziņojumus uz tīklā parādītajiem mezgliem, piedāvājot pārraides ātrumu līdz 1 Mbps. Efektīvai pārraidei tiek izmantotas uzticamas kļūdu noteikšanas metodes - un, lai šķīrējtiesu par ziņu prioritāti un sadursmju noteikšanu, tā izmanto nesēja multiplās piekļuves protokolu. Pateicoties šīm uzticamajām datu pārraides īpašībām, šis protokols ir izmantots autobusos, automašīnās un citās automašīnu sistēmās, rūpnīcu un rūpniecības automatizācijā, kalnrūpniecības lietojumprogrammās utt.
CAN datu pārraide
CAN protokols nav protokols, kas balstīts uz adresi, bet gan uz ziņojumu orientēts protokols, kur iegultajam ziņojumam CAN ir pārsūtāmo datu saturs un prioritāte. Sākot ar datu saņemšanu kopnē, katrs mezgls izlemj, vai atmest datus vai tos apstrādāt - un pēc tam atkarībā no sistēmas tīkla ziņojums ir paredzēts vienam mezglam vai daudziem citiem mezgliem. CAN sakari ļauj konkrētam mezglam pieprasīt informāciju no jebkura cita mezgla, nosūtot RTR (Remote Transmit Request).

CAN protokola datu pārraide
Tas piedāvā automātisku datu pārsūtīšanu bez šķīrējtiesas, pārsūtot augstākās prioritātes ziņojumu un atbalstot un gaidot zemākas prioritātes ziņojumu. Šajā protokolā dominējošais ir loģisks 0, un recesīvais ir loģisks 1. Kad viens mezgls pārraida recesīvu bitu, bet otrs - dominējošu bitu, tad dominējošais bits uzvar. Ar prioritāti pamatota šķīrējtiesas shēma izlemj, vai tiks piešķirta atļauja turpināt pārraidi, ja vienlaikus sūtīs divas vai vairākas ierīces.
CAN ziņojumu rāmis
CAN sakaru tīklā var konfigurēt dažādus rāmja vai ziņojumu formātus.
- Standarta vai bāzes kadra formāts vai CAN 2.0 A
- Paplašināta kadra formāts vai CAN 2.0 B

Standarta vai bāzes kadra formāts vai CAN 2.0 A
Atšķirība starp šiem diviem formātiem ir tāda, ka bitu garums, ti, bāzes rāmis atbalsta identifikatora 11 bitu garumu, savukārt paplašinātais rāmis atbalsta identifikatora 29 bitu garumu, kas sastāv no 18 bitu paplašinājuma un 11 bitu identifikators. IDE bits atšķiras CAN paplašinātā kadra formātā un CAN bāzes kadra formātā, kur IDE tiek pārsūtīts kā dominējošais 11 bitu kadru gadījumā un recesīvs 29 bitu kadru gadījumā. Ir iespējams arī nosūtīt vai saņemt ziņojumus bāzes kadra formātā ar dažiem CAN kontrolleriem, kas atbalsta paplašinātā kadra formātus.

Paplašināta kadra formāts vai CAN 2.0 B
CAN protokolam ir četru veidu rāmji: datu rāmis, attālais rāmis, kļūdu rāmis un pārslodzes rāmis. Datu rāmis satur pārraides mezglu datus attālais rāmis pieprasa īpašu identifikatoru pārraides kļūdas rāmis atklāj visas mezglu kļūdas un pārslodzes rāmis aktivizējas, kad sistēma ievada kavēšanos starp datiem vai attālo rāmi. CAN sakari teorētiski var savienot līdz 2032 ierīcēm vienā tīklā, bet praktiski tas ir ierobežots līdz 110 mezgliem aparatūras raiduztvērēju dēļ. Tas atbalsta kabeļu vadīšanu līdz 250 metriem ar datu pārraides ātrumu 250 Kbps ar bitu pārraides ātrumu 10 Kbps, maksimālais garums ir 1 km, un īsākais ar 1 Mbps ir 40 metri.
Rūpnieciskā automatizācija un vadība, izmantojot CAN protokolu
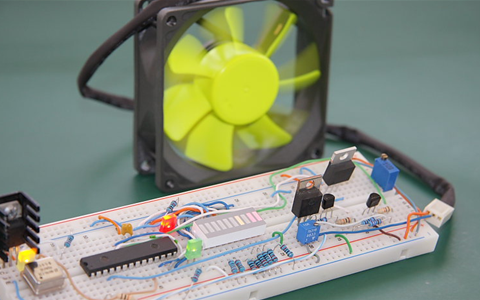
Šis projekts tiek īstenots, lai kontrolētu rūpniecisko slodzes, kuras darbina līdzstrāvas motors, pamatojoties uz procesa temperatūras izmaiņām. Dažādi procesu vadības sistēmas ir atkarīgs no temperatūras. Pieņemsim, ka maisītāja tvertnes gadījumā - pēc noteiktas temperatūras sasniegšanas - jāmaina līdzstrāvas motors, lai maisītājs pagrieztos. Tātad šis projekts to panāk, izmantojot CAN protokolu, kas ir ļoti efektīva un uzticama komunikācija ar zemām izmaksām.
Šajā projektā tiek izmantoti divi mikrokontrolleri, viens temperatūras datu iegūšanai un otrs kontrolējot līdzstrāvas motoru . CAN kontrolieris MCP2515 un CAN uztvērējs MCP2551 ir savienoti ar abiem mikrokontrolleriem, lai ieviestu CAN komunikāciju datu apmaiņai.

Rūpnieciskā automatizācija un vadība, izmantojot CAN protokolu
Pārraides sānu mikrokontrolleris nepārtraukti uzrauga temperatūru, izmantojot LM35 temperatūras sensors pārveidojot analogās vērtības ciparu formātā, pievienojot tam ADC. Šīs vērtības tiek salīdzinātas ar iestatītajām vērtībām, kas ieprogrammētas mikrokontrollerī, un šīs vērtības tiek pārkāptas, kad mikrokontrolleris sūta vai nosūta datus uztvērējam sānu mikrokontrolleru ar CAN kontrolieri un uztvērēju.
Saņemošās puses CAN sakari saņem datus un pārsūta tos uz mikrokontrolleru, kas tālāk apstrādā datus un kontrolē līdzstrāvas motoru ar motora-vadītāja IC. Ir iespējams arī mainīt motora virzienu ar vadītāja IC, kuru kontrolē mikrokontrolleris.
Tādējādi CAN protokols nodrošina vienādranga komunikāciju, savienojot dažādus mezglus rūpnieciskajā vidē. Šāda veida saziņu var īstenot arī citos automatizācijas sistēmas, piemēram, mājas vai ēka , rūpnīca utt. Mēs ceram, ka šis raksts, iespējams, ļāva jums labāk izprast rūpniecisko automatizāciju ar CAN komunikāciju. Lūdzu, rakstiet mums, lai iegūtu papildinformāciju un jautājumus.
Foto kredīti:
- Rūpnieciskā automatizācija un vadība wlimg
- Rūpnieciskās automatizācijas arhitektūra siemens
- Atvērto sistēmu starpsavienojuma (OSI) modeli izstrādāja ēst
- CAN protokola datu pārraide ar var-cia
- Standarta vai bāzes kadra formāts vai CAN 2.0 A ar tehnoloģija
- Paplašināts kadra formāts vai CAN 2.0 B ar platjoslas










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}