
Kā norāda nosaukums, šis raksts sniegs precīzu priekšstatu par PID kontroliera struktūru un darbību. Tomēr, iedziļinoties detaļās, gūsim ievadu par PID kontrolieriem. PID kontrolieri ir plaši izmantoti rūpniecisko procesu kontrolei. Aptuveni 95% no rūpnieciskā automatizācija nozarē izmantot PID kontrolierus. PID apzīmē proporcionāli integrētu atvasinājumu. Šie trīs kontrolieri ir apvienoti tā, ka tas rada vadības signālu. Kā atgriezeniskās saites kontrolieris tas nodrošina vadības izeju vēlamajos līmeņos. Pirms mikroprocesoru izgudrošanas PID vadību ieviesa analogie elektroniskie komponenti. Bet šodien visus PID kontrolierus apstrādā mikroprocesori. Programmējami loģiskie kontrolieri ir arī iebūvētās PID kontroliera instrukcijas. PID kontrolieru elastības un uzticamības dēļ tos tradicionāli izmanto procesu vadības lietojumprogrammās.
Kas ir PID kontrolieris?
Termins PID apzīmē proporcionālu neatņemamu atvasinājumu, un tā ir viena veida ierīce, ko izmanto, lai kontrolētu dažādus procesa mainīgos, piemēram, spiedienu, plūsmu, temperatūru un ātrumu rūpnieciskās lietojumprogrammās. Šajā kontrolierī visu procesu mainīgo regulēšanai tiek izmantota vadības cilpas atgriezeniskās saites ierīce.
Šāda veida vadība tiek izmantota, lai sistēmu virzītu objektīvās atrašanās vietas virzienā, citādi. Tas ir gandrīz visur temperatūras kontrolei un tiek izmantots zinātniskos procesos, automatizācijā un neskaitāmās ķīmiskās vielās. Šajā kontrolierī slēgtā cikla atgriezeniskā saite tiek izmantota, lai saglabātu reālo izeju no tādas metodes kā tuvu objektam, pretējā gadījumā, ja iespējams, fiksētā vietā. Šajā rakstā ir aplūkots PID kontroliera dizains ar tajos izmantotajiem vadības režīmiem, piemēram, P, I un D.
Vēsture
PID kontroliera vēsture ir šāda: 1911. gadā pirmo PID kontrolieri izstrādāja Elmers Sperijs. Pēc tam TIC (Taylor Instrumental Company) tika ieviests bijušais pneimatiskais kontrolieris ar pilnībā noskaņojamu 1933. gadā. Pēc dažiem gadiem vadības inženieri novērsa līdzsvara stāvokļa kļūdu, kas konstatēta proporcionālajos kontrolieros, pārorientējot galu uz kādu nepatiesu vērtību, līdz kļūda nav nulle.
Šajā atkārtotajā noregulējumā tika iekļauta kļūda, kas pazīstama kā proporcionāls-integrāls kontrolleris. Pēc tam 1940. gadā ar atvasinātu darbību tika izstrādāts pirmais pneimatiskais PID kontrolieris, lai samazinātu pārsniegšanas problēmas.
1942. gadā Ziegler & Nichols ieviesa regulēšanas noteikumus, lai inženieri atklātu un iestatītu piemērotus PID kontrolieru parametrus. Beidzot automātiskos PID kontrolierus rūpniecībā plaši izmantoja 1950. gada vidū.
PID kontroliera bloka diagramma
Slēgta cikla sistēma, piemēram, PID kontrolieris, ietver atgriezeniskās saites vadības sistēmu. Šī sistēma novērtē atgriezeniskās saites mainīgo, izmantojot fiksētu punktu, lai ģenerētu kļūdas signālu. Pamatojoties uz to, tas maina sistēmas izvadi. Šī procedūra turpināsies, līdz kļūda sasniegs nulli, pretējā gadījumā atgriezeniskās saites mainīgā vērtība kļūst līdzvērtīga fiksētam punktam.
Šis kontrolieris nodrošina labus rezultātus, salīdzinot ar ON / OFF tipa kontrolieri. ON / OFF tipa kontrolierī ir vienkārši divi nosacījumi, lai pārvaldītu sistēmu. Kad procesa vērtība būs zemāka par fiksēto punktu, tā ieslēgsies. Līdzīgi tas tiks izslēgts, kad vērtība būs lielāka par fiksēto vērtību. Šāda veida kontrolierī produkcija nav stabila, un tā bieži mainīsies fiksētā punkta reģionā. Tomēr šis kontrolieris ir vienmērīgāks un precīzāks, salīdzinot ar ON / OFF tipa kontrolieri.

PID kontroliera darbība
PID kontroliera darbība
Izmantojot zemu izmaksu vienkāršu ON-OFF kontrolieri, ir iespējami tikai divi vadības stāvokļi, piemēram, pilnībā ON vai OFF. To izmanto ierobežotai vadības lietošanai, kur kontroles mērķim pietiek ar šiem diviem vadības stāvokļiem. Tomēr šīs vadības svārstīgais raksturs ierobežo tās izmantošanu, tāpēc to aizstāj PID kontrolieri.
PID kontrolieris uztur izvadi tā, ka starp procesa mainīgo un iestatītās vērtības / vēlamās izejas kļūdu ir nulle, izmantojot slēgtas cilpas darbības. PID izmanto trīs pamata kontroles uzvedības veidus, kas ir paskaidroti turpmāk.
P- kontrolieris
Proporcionālais vai P- kontrolieris dod izeju, kas ir proporcionāla pašreizējai kļūdai e (t). Tas salīdzina vēlamo vai iestatīto punktu ar faktisko vērtību vai atgriezeniskās saites procesa vērtību. Iegūtā kļūda tiek reizināta ar proporcionālu konstanti, lai iegūtu rezultātu. Ja kļūdas vērtība ir nulle, tad šī kontrollera izeja ir nulle.

P-kontrolieris
Šim kontrolierim ir nepieciešama neobjektivitāte vai manuāla atiestatīšana, ja to lieto atsevišķi. Tas ir tāpēc, ka tas nekad nesasniedz līdzsvara stāvokli. Tas nodrošina stabilu darbību, bet vienmēr uztur līdzsvara stāvokļa kļūdu. Reakcijas ātrums tiek palielināts, palielinoties proporcionālajai konstantei Kc.

P-kontroliera atbilde
Es-kontrolieris
Sakarā ar p-kontroliera ierobežojumu, ja vienmēr pastāv nobīde starp procesa mainīgo un iestatīto vērtību, ir nepieciešams I-kontrolieris, kas nodrošina nepieciešamo darbību, lai novērstu līdzsvara stāvokļa kļūdu. Tas integrē kļūdu noteiktā laika posmā, līdz kļūdas vērtība sasniedz nulli. Tas saglabā galīgās vadības ierīces vērtību, pie kuras kļūda kļūst nulle.

PI kontrolieris
Integrēta vadība samazina tā jaudu, kad notiek negatīva kļūda. Tas ierobežo reakcijas ātrumu un ietekmē sistēmas stabilitāti. Reakcijas ātrumu palielina, samazinoties integrālajam pieaugumam, Ki.

PI kontroliera atbilde
Iepriekš redzamajā attēlā, samazinoties I-kontrollera pieaugumam, samazinās arī līdzsvara stāvokļa kļūda. Lielākajā daļā gadījumu PI kontrolieris tiek izmantots īpaši gadījumos, kad ātrgaitas reakcija nav nepieciešama.
Lietojot PI kontrolieri, I-kontroliera izeja ir ierobežota ar zināmu diapazonu, lai pārvarētu neatņemama likvidācija apstākļi, kad integrālā jauda turpina palielināties pat pie nulles kļūdas stāvokļa, pateicoties nelineārām iekārtā.
D-kontrolieris
Es-kontrolieris nespēj paredzēt turpmāko kļūdu uzvedību. Tāpēc tas normāli reaģē, tiklīdz ir mainīta iestatītā vērtība. D-kontrolieris pārvar šo problēmu, paredzot kļūdas turpmāko darbību. Tās iznākums ir atkarīgs no kļūdas izmaiņu ātruma attiecībā pret laiku, kas reizināts ar atvasinājuma konstanti. Tas dod izejas sākumu, tādējādi palielinot sistēmas reakciju.

PID kontrolieris
Iepriekšminētajā D attēla reakcijā kontrolieris ir vairāk, salīdzinot ar PI kontrolieri, un tiek samazināts arī izejas nosēšanās laiks. Tas uzlabo sistēmas stabilitāti, kompensējot fāzes nobīdi, ko izraisa I-kontrolieris. Atvasinātā pieauguma palielināšana palielina reakcijas ātrumu.

PID kontroliera atbilde
Tātad visbeidzot mēs novērojām, ka, apvienojot šos trīs kontrolierus, mēs varam iegūt vēlamo sistēmas reakciju. Dažādi ražotāji izstrādā dažādus PID algoritmus.
PID kontroliera veidi
PID kontrolieri tiek klasificēti trīs tipos, piemēram, ON / OFF, proporcionālā un standarta tipa kontrolieri. Šie kontrolieri tiek izmantoti, pamatojoties uz vadības sistēmu, lietotājs var izmantot kontrolieri, lai regulētu metodi.
ON / OFF kontrole
Ieslēgšanas / izslēgšanas vadības metode ir vienkāršākais ierīces veids, ko izmanto temperatūras kontrolei. Ierīces izeja var būt IESLĒGTA / IZSLĒGTA bez centrālā stāvokļa. Šis kontrolieris ieslēdz izeju tikai tad, kad temperatūra šķērso fiksēto punktu. Limita kontrolieris ir viens īpašs ieslēgšanas / izslēgšanas kontroliera veids, kas izmanto fiksējošo releju. Šis relejs tiek atiestatīts manuāli un tiek izmantots, lai izslēgtu metodi, kad ir sasniegta noteikta temperatūra.
Proporcionāla kontrole
Šāda veida kontrolieris ir paredzēts, lai noņemtu riteņbraukšanu, kas ir savienota ar ON / OFF vadības palīdzību. Šis PID regulators samazinās normālo jaudu, kas tiek piegādāta sildītājam, tiklīdz temperatūra sasniedz fiksēto punktu.
Šim kontrolierim ir viena funkcija, lai kontrolētu sildītāju tā, lai tas nepārsniegtu fiksēto punktu, tomēr tas sasniegs fiksēto punktu, lai uzturētu vienmērīgu temperatūru.
Šo proporcionālo darbību var panākt, ieslēdzot un izslēdzot izeju uz maziem laika periodiem. Šī laika proporcija mainīs attiecību no ON laika uz OFF laiku temperatūras kontrolei.
Standarta tipa PID kontrolieris
Šāda veida PID kontrolieris apvienos proporcionālo vadību, izmantojot integrētu un atvasinātu vadību, lai automātiski palīdzētu vienībai kompensēt izmaiņas sistēmā. Šīs modifikācijas, integrālis un atvasinājums ir izteiktas laika vienībās.
Šie kontrolieri tiek nosūtīti arī caur to savstarpējiem, attiecīgi RATE & RESET. PID noteikumi ir jāpielāgo atsevišķi, citādi pielāgojot tos noteiktai sistēmai ar izmēģinājumu, kā arī kļūdām. Šie kontrolieri piedāvās visprecīzāko un vienmērīgāko 3 veidu kontrolieru vadību.
Reālā laika PID kontrolieri
Pašlaik tirgū ir pieejami dažādi PID kontrolieri. Šie regulatori tiek izmantoti rūpnieciskās vadības prasībām, piemēram, spiedienam, temperatūrai, līmenim un plūsmai. Kad šie parametri tiek kontrolēti, izmantojot PID, izvēloties tiek izmantots atsevišķs PID kontrolieris vai nu PLC.
Šie atsevišķi kontrolieri tiek izmantoti visur, kur citādi ir jāpārbauda divas cilpas, kā arī jāpārvalda citādi apstākļos, kur tas ir sarežģīts ar tiesībām iekļūt caur lielākām sistēmām.
Šīs vadības ierīces nodrošina atšķirīgu izvēli solo un divu cilpu kontrolei. Atsevišķi PID kontrolieri nodrošina vairākas fiksēto punktu konfigurācijas, lai izveidotu autonomas vairākas trauksmes.
Šie savrupie kontrolieri galvenokārt ietver PID kontrolierus no Honeywell, temperatūras regulatorus no Yokogawa, automātiskos regulatorus no OMEGA, Siemens un ABB kontrolieriem.
PLC tiek izmantoti kā PID kontrolieri lielākajā daļā rūpnieciskās vadības lietojumu. PID bloku izkārtojumu var veikt PAC vai PLC, lai sniegtu lieliskas izvēles precīzai PLC kontrolei. Šie kontrolieri ir gudrāki, kā arī jaudīgi, salīdzinot ar atsevišķiem kontrolieriem. Katrā PLC programmatūras programmēšanā ir iekļauts PID bloks.
Pielāgošanas metodes
Pirms PID kontroliera darbības ir jāpielāgo tā, lai tas atbilstu kontrolējamā procesa dinamikai. Dizaineri norāda noklusējuma vērtības P, I un D termiņiem, un šīs vērtības nevarēja nodrošināt vēlamo veiktspēju, un dažreiz tas noved pie nestabilitātes un lēnas vadības veiktspējas. Lai pielāgotu PID kontrolierus, tiek izstrādāti dažāda veida regulēšanas paņēmieni, un, lai izvēlētos labākās proporcionālā, integrālā un atvasinātā pieauguma vērtības, ir nepieciešama liela operatora uzmanība. Daži no tiem ir sniegti zemāk.
PID kontrolieri tiek izmantoti lielākajā daļā rūpniecisko lietojumu, taču ir jāzina šī kontrollera iestatījumi, lai to pareizi pielāgotu, lai ģenerētu vēlamo izvadi. Šeit noregulēšana nav nekas cits kā ideālas atbildes saņemšana no kontroliera, nosakot labākos proporcionālos ieguvumus, integrālos un atvasinātos faktorus.
Vēlamo PID kontroliera izvadi var iegūt, noregulējot regulatoru. Ir pieejami dažādi paņēmieni, kā iegūt nepieciešamo kontroliera izvadi, piemēram, izmēģinājums un kļūda, Zeiglera-Nihola un procesa reakcijas līkne. Visbiežāk izmantotās metodes ir izmēģinājums un kļūda, Zeigler-Nichols utt.
Izmēģinājuma un kļūdas metode: Tā ir vienkārša PID kontroliera regulēšanas metode. Kamēr sistēma vai kontrolieris darbojas, mēs varam noskaņot kontrolieri. Šajā metodē vispirms mums jānosaka Ki un Kd vērtības uz nulli un jāpalielina proporcionālais termiņš (Kp), līdz sistēma sasniedz svārstību uzvedību. Kad tas ir svārstīgs, noregulējiet Ki (Integral term) tā, lai svārstības apstātos un visbeidzot noregulētu D, lai iegūtu ātru reakciju.
Procesa reakcijas līknes tehnika: Tā ir atvērtas cilpas regulēšanas tehnika. Tas rada atbildi, kad sistēmai tiek piemērota pakāpiena ievade. Sākumā mums ir jāpielieto daži vadības izvadi sistēmai manuāli un jāreģistrē atbildes līkne.
Pēc tam mums jāaprēķina slīpums, miris laiks, līknes pieauguma laiks un visbeidzot jāaizstāj šīs vērtības P, I un D vienādojumos, lai iegūtu PID terminu pastiprinājuma vērtības.

Procesa reakcijas līkne
Zeiglera-Nikolsa metode: Zeiglers-Nikolss piedāvāja slēgtas cilpas metodes PID kontroliera noregulēšanai. Tās ir nepārtrauktas riteņbraukšanas metode un slāpēta svārstību metode. Procedūras abām metodēm ir vienādas, bet svārstību izturēšanās ir atšķirīga. Vispirms mums ir jāiestata p-kontroliera konstante Kp noteiktā vērtībā, savukārt Ki un Kd vērtības ir nulle. Proporcionālais pieaugums tiek palielināts, līdz sistēma svārstās nemainīgā amplitūdā.
Peļņu, pie kuras sistēma rada nemainīgas svārstības, sauc par galīgo pieaugumu (Ku) un svārstību periodu par galīgo periodu (Pc). Kad tas ir sasniegts, mēs varam ievadīt P, I un D vērtības PID kontrolierī, ko tabula Zeigler-Nichols ir atkarīga no izmantotā kontrollera, piemēram, P, PI vai PID, kā parādīts zemāk.

Zeiglera-Nikolsa tabula
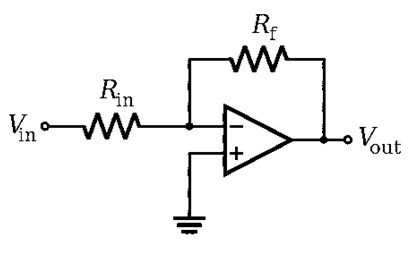
PID kontroliera struktūra
PID kontrolieris sastāv no trim termiņiem, proti, proporcionālās, integrālās un atvasinātās vadības. Šo trīs kontrolieru apvienotā darbība dod vadības stratēģiju procesa kontrolei. PID kontrolieris manipulē ar procesa mainīgajiem lielumiem, piemēram, spiedienu, ātrumu, temperatūru, plūsmu utt. Dažās lietojumprogrammās PID kontrolieri tiek izmantoti kaskādes tīklos, kur vadības panākšanai tiek izmantoti divi vai vairāki PID.

PID kontroliera struktūra
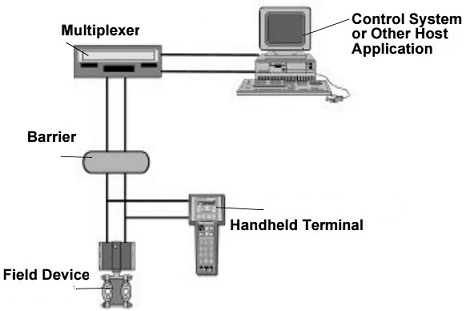
Iepriekš redzamais attēls parāda PID kontroliera struktūru. Tas sastāv no PID bloka, kas dod savu izvadi procesa blokam. Process / iekārta sastāv no gala vadības ierīcēm, piemēram, izpildmehānismiem, vadības vārstiem un citām vadības ierīcēm dažādu rūpniecības / rūpnīcas procesu kontrolei.
Procesa iekārtas atgriezeniskās saites signāls tiek salīdzināts ar iestatīto punktu vai atskaites signālu u (t), un attiecīgais kļūdas signāls e (t) tiek ievadīts PID algoritmā. Saskaņā ar proporcionālās, integrālās un atvasinātās vadības aprēķiniem algoritmā kontrolieris rada kombinētu reakciju vai kontrolētu izeju, kas tiek pielietota augu vadības ierīcēm.
Visām vadības lietojumprogrammām nav nepieciešami visi trīs vadības elementi. Kombinācijas, piemēram, PI un PD kontrole, ļoti bieži tiek izmantotas praktiskos nolūkos.
Pieteikumi
PID kontroliera lietojumprogrammās ir šādas.
Vislabākā PID regulatora lietojumprogramma ir temperatūras kontrole, kur regulators izmanto temperatūras sensora ieeju, un tā izvadi var savienot ar vadības elementu, piemēram, ventilatoru vai sildītāju. Parasti šis regulators ir vienkārši viens elements temperatūras kontroles sistēmā. Izvēloties pareizo kontrolieri, ir jāpārbauda, kā arī jāapsver visa sistēma.
Krāsns temperatūras kontrole
Parasti krāsnis izmanto, lai iekļautu apkuri, kā arī tur milzīgu izejvielu daudzumu pie milzīgas temperatūras. Parasti aizņemtajā materiālā ir milzīga masa. Līdz ar to ir nepieciešams liels inerces daudzums, un materiāla temperatūra strauji nemainās pat tad, ja tiek pielietots milzīgs siltums. Šī funkcija nodrošina vidēji stabilu PV signālu un ļauj atvasinātajam periodam efektīvi novērst kļūdu, neveicot ārkārtējas izmaiņas ne FCE, ne CO.
MPPT uzlādes kontrolieris
Fotoelementu V-I raksturojums galvenokārt ir atkarīgs no temperatūras diapazona, kā arī no izstarojuma. Pamatojoties uz laika apstākļiem, strāvas un darba spriegums pastāvīgi mainīsies. Tāpēc ir ārkārtīgi svarīgi izsekot efektīvas fotoelektriskās sistēmas augstākajam PowerPoint. PID kontrolieris tiek izmantots MPPT atrašanai, piešķirot PID regulatoram fiksētus sprieguma un strāvas punktus. Kad laika apstākļi ir mainīti, izsekotājs uztur strāvas un sprieguma stabilitāti.
Enerģijas elektronikas pārveidotājs
Mēs zinām, ka pārveidotājs ir jaudas elektronikas pielietojums, tāpēc pārveidotājos galvenokārt tiek izmantots PID kontrolieris. Ikreiz, kad pārveidotāju savieno sistēma, pamatojoties uz slodzes izmaiņām, pārveidotāja izeja tiks mainīta. Piemēram, invertoru savieno ar slodzi, milzīgā strāva tiek piegādāta, tiklīdz slodze tiek palielināta. Tādējādi sprieguma, kā arī strāvas parametrs nav stabils, bet tas mainīsies, pamatojoties uz prasību.
Šajā stāvoklī šis kontrolieris ģenerēs PWM signālus, lai aktivizētu invertora IGBT. Pamatojoties uz slodzes izmaiņām, atbildes signāls tiek nodrošināts PID kontrolierim tā, lai tas radītu n kļūdu. Šie signāli tiek ģenerēti, pamatojoties uz bojājuma signālu. Šajā stāvoklī mēs varam iegūt maināmu ievadi un izvadi, izmantojot līdzīgu invertoru.
PID kontroliera pielietojums: Slēgta cilpas vadība līdzstrāvas motoram bez sukām
PID kontroliera saskarne
PID kontroliera dizainu un saskarni var veikt, izmantojot Arduino mikrokontrolleru. Laboratorijā Arduino bāzes PID kontrolieris ir veidots, izmantojot Arduino UNO plāksni, elektroniskos komponentus, termoelektrisko dzesētāju, turpretī šajā sistēmā izmantotās programmatūras programmēšanas valodas ir C vai C ++. Šo sistēmu izmanto temperatūras kontrolei laboratorijā.
PID parametri konkrētam kontrolierim tiek atrasti fiziski. Dažādu PID parametru funkciju var īstenot, izmantojot nākamo kontrastu starp dažādu veidu kontrolieriem.
Šī saskarnes sistēma var efektīvi aprēķināt temperatūru ar kļūdu ± 0,6 ℃, turpretī nemainīga temperatūra tiek regulēta tikai ar nelielu atšķirību no vēlamās vērtības. Šajā sistēmā izmantotie jēdzieni nodrošinās lētus, kā arī precīzus paņēmienus fizisko parametru pārvaldīšanai vēlamajā diapazonā laboratorijā.
Tādējādi šajā rakstā ir apskatīts PID kontroliera pārskats, kas ietver vēsturi, blokshēmu, struktūru, veidus, darbu, regulēšanas metodes, saskarnes, priekšrocības un lietojumprogrammas. Mēs ceram, ka mēs spējām sniegt pamatzināšanas, tomēr precīzas zināšanas par PID kontrolieriem. Šeit ir vienkāršs jautājums jums visiem. Kuru metodi starp dažādām regulēšanas metodēm vēlams izmantot, lai panāktu PID kontroliera optimālu darbību un kāpēc?
Jums tiek lūgts sniegt atbildes zemāk esošajā komentāru sadaļā.
Fotoattēlu kredīti
PID kontroliera blokshēma ar wikimedia
PID kontroliera struktūra, P-kontrolieris, P - kontroliera atbilde un PID kontrolieris emuārs.opticontrols
P - kontroliera reakcija ar kontrolē.dzinējs.umich
PI- kontroliera atbilde m. ēst
PID kontroliera atbilde wikimedia
Zeiglera-Nikolsa tabula pēc kontrolē.dzinējs





{kind=link}
{kind=link}
{kind=link}
{kind=link}