Šajā rakstā ir paskaidrota metode, kuru, iespējams, var izmantot, lai uzlabotu pasīvo infrasarkano sensoru spēju noteikt pat cilvēka statisko vai kancelejas piederumu. Šī funkcija parasti nav iespējama ar parastajiem PIR sensoriem.
Kā PIR nosaka cilvēka klātbūtni
Esmu jau apspriedis daudzas PIR balstītas kustības detektoru lietojumprogrammas šajā vietnē, tomēr visiem šiem lietojumiem ir nepieciešams, lai cilvēka klātbūtne būtu nepārtraukti kustībā, lai PIR atklātu viņu klātbūtni. Tas, šķiet, ir liels trūkums, kas neļauj šīm vienībām uztvert pastāvīga vai nekustīga cilvēku aizņemtība.
Tomēr iepriekš izskaidrotajam trūkumam ir iemesls. Parastie PIR sensori darbojas, uztverot cilvēka ķermeņa infrasarkanos signālus caur pāris paralēlām spraugām uz priekšējā lēcas, un tā iekšējā shēma aktivizējas tikai tad, kad infrasarkanie signāli šķērso šīs sensācijas spraugas (“vīzijas”).
IR signālu krustojums pa sensoru spraugām ļauj PIR shēmai pārtulkot informāciju divos atbilstošos mainīgos impulsos, kas savukārt tiek iztaisnots, lai radītu iedarbināšanas spriegumu PIR izejas tapā.
PIR nevar noteikt kancelejas preču mērķi
Tas nozīmē, ka, ja IR avots ir nekustīgs, tas neliks PIR modulim radīt jebkādu sprūdu visā tā izejas tapā. Tas nozīmē arī to, ka infrasarkanajam signālam no avota kaut kā jāturpinās šķērsot noteiktos PIR noteikšanas slotus, lai tas ļautu sajust konkrētu cilvēku zonā.
Šķiet, ka tam nav tieša vai vienkārša līdzekļa, jo PIR moduļus nevar iekšēji modificēt, kas traucē vienību atklāt stacionāru cilvēku klātbūtni.
Tomēr loģiska ievērošana mums saka, ka, ja tā mainīgais IR avots, kas var būt nepieciešams, lai PIR modulis būtu aktivizēts, tad kāpēc gan nepiespiest pašu PIR būt nemainīgā kustībā subjekta vietā.
Koncepciju var vizualizēt no šādas GIF simulācijas, kas parāda svārstīgu PIR moduli un statisku cilvēku detektora zonā.

Šeit mēs varam redzēt, kā svārstīgs PIR pielāgojas problēmai un pārveido sevi, ļaujot noteikt pat statiskus IR objektus.
Tas kļūst iespējams, jo, pārvietojoties, PIR modulis pārveido stacionāro IR avotu par nepārtraukti mainīgu IR attēlveidošanu abos saņemošajos laika nišos.
Lai gan ideja izskatās sarežģīta, to faktiski var vienkārši atrisināt, izmantojot lēni svārstīgu PwM kontrolētu motora ķēdi.
Mēs uzzināsim visu mehānismu un ķēdes detaļas nākamajās sadaļās.
Kā mēs jau apspriedām, parastie PIR moduļi spēj noteikt tikai kustīgus dzīvus objektus un nevar noteikt stacionāru mērķi, kas padara tā lietošanu ierobežotu tikai kā cilvēka kustības detektoru.
Lietojumos, kur šādos gadījumos ir nepieciešama cilvēka aizņemtības noteikšana, parasts PIR var kļūt nederīgs, un tā modernizēšanai var būt nepieciešama kāda ārēja vienošanās.
PIR projektēšana nekustīgu mērķu noteikšanai
Iepriekšējā sadaļā mēs uzzinājām, ka tā vietā, lai mērķis būtu kustībā, PIR moduli var pārvietot pa noteiktu rādiusu, lai īstenotu vēlamo statisko mērķa noteikšanu.
Nākamajās sadaļās mēs uzzinām par vienkāršu ķēdes mehānismu, ko var izmantot ar PIR, kas uzstādīts virs neliela līdzstrāvas motora paredzētajām svārstībām.
PWM / Flip Flop kontrolēts motora draiveris
Sistēma būtībā prasa PWM kontrolēta ātruma noteikšana un flip flop pārslēgšana motoram. Šī diagramma parāda, kā šīs funkcijas var attiecināt uz PIR motoru, izmantojot vienkāršu ķēdi:

Parādītajā ķēdē tiek izmantots viens IC HEF40106 sešstūra invertējošais schmitt vārtu IC, kurā ietilpst 6 invertora NAV vārti.
Vārti N1 un N2 ir konfigurēti, lai radītu regulējamu PWM izeju, kas tiek padota vārtiem N4, N5, N6, veidojot buferus.
Kopējā izeja no šiem bufera vārtiem tiek pārtraukta līdz motora vadītāja mosfet vārtiem.
PWM saturs tiek iestatīts ar P1 palīdzību, kas beidzot tiek piemērots pievienotajam motoram, izmantojot DPDT releja kontaktu komplektu.
Šie releja kontakti nosaka motora kustības virzienu (pulksteņrādītāja virzienā vai pretēji pulksteņrādītāja virzienam).
Šo flip flop DPDT releja kontaktus kontrolē ap vārti N3 konfigurēts taimeris, kurā kondensators C3 / R3 nosaka, ar kādu ātrumu relejam jāpārslēdzas, lai motors varētu konsekventi mainīt rotācijas virzienu.
Iepriekš minētais dizains ļauj motoram izpildīt nepieciešamo lēnās kustības turp un atpakaļ pāri noteiktai radiālajai zonai.
C3 var izvēlēties, lai sāktu pārslēgšanos ik pēc 5 līdz 6 sekundēm, un PWm var noregulēt, lai nodrošinātu ļoti lēnu motora kustību, jo tam vienkārši jānodrošina, ka PIR sloti šķērso mērķa IR signālus savlaicīgi.
Tomēr, tā kā motora darbība ir lēna, PIR izeja būs jāuztur ar aizkaves izslēgšanas taimeri, lai pievienotā slodze netiktu izslēgta un ieslēgta, kamēr motora kustība pārmaiņus pārtrauc infrasarkano staru līnijas no cilvēka aizņemtības.
Kavēšanās taimeris
Sekojošais kavēšanās taimera ķēdes posms var izmantot, kas nodrošina, ka katru reizi, kad PIR izeja rada uztverto impulsu, taimera aizture tiek pagarināta par 5 līdz 10 sekundēm un pievienotā slodze procesa laikā nekad netiek pārtraukta.

Iepriekšminētajā uzstādījumā mēs varam redzēt motoru, kas saņem elektrisko piedziņu no PWM / flip flop stadijas, kā apspriests iepriekšējā punktā.
Motora vārpstu var redzēt savienojumā ar horizontālu vārpstu, virs kuras PIR ir piestiprināts tā, ka, motoram pārvietojoties, PIR iziet attiecīgi mainīgu radiālo kustību uz priekšu un atpakaļ.
Kamēr tiek ierosināta iepriekš minētā PIR kustība, infrasarkanie signāli no stacionāra mērķa zonā tiek atklāti īsu alternatīvu impulsu veidā, kas tiek ģenerēti pie PIR izejas kontakta, kas norādīts ar zilu vadu.
Šie impulsi tiek izmantoti visā 1000uF kondensatorā, kas uzlādējas ar katru impulsu un nodrošina, ka BC547 procesa laikā tiek uzturēts vadīšanas režīmā bez pārtraukumiem.
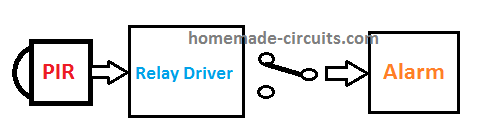
Releja draiveris, kas sastāv no pakāpes BC557, reaģē uz iepriekš minēto stabilo signālu no kolektora BC547 un savukārt uztur releju ieslēgtu, kamēr PIR joprojām atklāj cilvēku klātbūtni.
Releja slodze tādējādi paliek nepārtraukti aktivizēta, jo apkārtnē atrodas stacionārs cilvēks.
Tomēr, ja cilvēku aizņemtība tiek noņemta vai kad mērķis attālinās no zonas, aizkaves taimera posms saglabā releju un slodzi aktivizētās noteiktās 5 līdz 10 sekundes, pēc tam tas pastāvīgi izslēdzas, līdz zona atkal tiek notverta ko rada potenciālais IR avots.
Detaļu saraksts
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1uF / 100V
- Z1 = 15V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST SLĒDZIS VAI DPDT RELEJS
- R3, C3 jānosaka ar dažiem izmēģinājumiem un kļūdām
ATJAUNINĀT:
Iepriekš paskaidroto PIR shēmu cilvēka statiskas klātbūtnes noteikšanai var daudz vienkāršot, izmantojot signāla smalcinātāja shēmu, kā parādīts šajā GIF simulācijā:
Rūpīga pārbaude parāda, ka patiesībā svārstību kustība vienkārši nav nepieciešama, motoram un smalcinātāja asmenim varētu ļaut brīvi griezties, turot motora ātrums zemākā līmenī .
Tas arī efektīvi paveiktu paredzēto statisko PIR uztveršanas darbību.

Video demonstrācija, kas pierāda statisku cilvēka atklāšanu PIR
Pāri: 3 izskaidrotas ar skaņu aktivizētas slēdžu shēmas Nākamais: 4 vienkāršas sirēnu shēmas, kuras varat izveidot mājās