Kontūru, kas ļauj lietotājam lineāri kontrolēt pievienotā motora ātrumu, pagriežot pievienoto potenciometru, sauc par motora ātruma regulatora ķēdi.
Šeit ir parādītas 3 viegli uzbūvējamas ātruma regulatora ķēdes līdzstrāvas motoriem, viena - ar MOSFET IRF540, otra - ar IC 555 un trešā - ar IC 556 - ar griezes momenta apstrādi.
1. dizains: Mosfet balstīts līdzstrāvas motora ātruma kontrolieris
Var izveidot ļoti atdzist un viegli līdzstrāvas motora ātruma regulatora ķēdi, izmantojot tikai vienu mosfetu, rezistoru un katlu, kā parādīts zemāk:

Izmantojot BJT Emitera sekotāju

Kā redzams, mosfet ir piesaistīts kā avota sekotājs vai kopējs drenāžas režīms, lai uzzinātu vairāk par šo konfigurāciju, iespējams, atsaukties uz šo ziņu , kurā aplūkota BJT versija, tomēr darba princips paliek nemainīgs.
Iepriekšminētajā līdzstrāvas motora kontroliera projektējumā katla pielāgošana rada atšķirīgu potenciālo starpību starp mosfet vārtiem, un mosfet avota tapa vienkārši seko šīs potenciālās atšķirības vērtībai un attiecīgi pielāgo spriegumu visā motorā.
Tas nozīmē, ka avots vienmēr būs 4 vai 5 V atpaliek no vārtu sprieguma un mainās uz augšu / uz leju ar šo atšķirību, parādot mainīgu spriegumu starp 2V un 7V visā motorā.
Kad vārtu spriegums ir aptuveni 7 V, avota tapa piegādā minimālo 2 V motoram, izraisot ļoti lēnu motora griešanos, un 7 V būs pieejams visā avota tapā, kad katla regulēšana ģenerēs pilnu 12 V pāri vārtiem. mosfet.
Šeit mēs varam skaidri redzēt, ka mosfet avota tapa, šķiet, 'seko' vārtiem un līdz ar to arī vārda avota sekotājs.
Tas notiek tāpēc, ka starpībai starp vārtiem un mosfet avota tapu vienmēr jābūt aptuveni 5 V, lai mosfet varētu optimāli darboties.
Jebkurā gadījumā iepriekš minētā konfigurācija palīdz panākt vienmērīgu motora ātruma kontroli, un dizainu varētu uzbūvēt diezgan lēti.
BJT varētu izmantot arī mosfet vietā, un faktiski BJT radītu lielāku vadības diapazonu no aptuveni 1 V līdz 12 V visā motorā.
Video demonstrācija
https://youtu.be/W762NTuQ19gKad runa ir par vienmērīgu un efektīvu motora ātruma regulēšanu, PWM balstīts kontrolieris kļūst par ideālu iespēju, šeit mēs uzzināsim vairāk par vienkāršu shēmu šīs operācijas īstenošanai.
2. dizains: PWM līdzstrāvas motora vadība ar IC 555
Vienkārša motora ātruma kontroliera konstrukciju, izmantojot PWM, var saprast šādi:
Sākotnēji, kad ķēde tiek darbināta, sprūda tapa ir loģiski zemā stāvoklī, jo kondensators C1 nav uzlādēts.
Iepriekš minētie apstākļi sāk svārstību ciklu, padarot izeju mainīgu uz loģiku.
Liela jauda tagad liek kondensatoram uzlādēt caur D2.
Sasniedzot sprieguma līmeni, kas ir 2/3 no barošanas, pin # 6, kas ir IC iedarbināšanas slieksnis.
Brīdī, kad piespraudes piespraude Nr. 6, tapas Nr. 3 un tapas Nr. 7 atgriežas zemā loģikā.
Kad tapas Nr. 3 ir zemas, C1 atkal sāk izlādi caur D1, un, kad spriegums pāri C1 nokrītas zem līmeņa, kas ir 1/3 no barošanas sprieguma, tapas Nr. 3 un tapas Nr. 7 atkal kļūst augstas, izraisot cikla sekošanu un turpini atkārtot.
Interesanti atzīmēt, ka C1 ir divi diskrēti iestatīti uzlādes un izlādes procesi, izmantojot attiecīgi D1, D2 diodes un caur katla iestatītajām pretestības svirām.
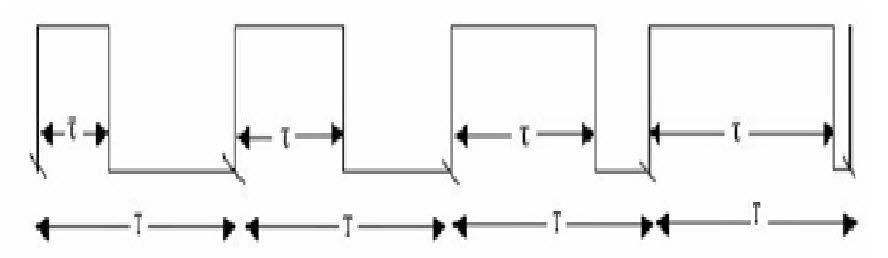
Tas nozīmē, ka pretestību summa, ar kuru saskaras C1, uzlādējot un izlādējoties, paliek nemainīga neatkarīgi no tā, kā katls ir iestatīts, tāpēc izliktā impulsa viļņa garums vienmēr paliek nemainīgs.
Tomēr, tā kā uzlādes vai izlādes laika periodi ir atkarīgi no pretestības vērtības, kas radusies viņu ceļā, katls diskrēti nosaka šos laika periodus atbilstoši tā pielāgojumiem.
Tā kā uzlādes un izlādes periodi ir tieši saistīti ar izejas darba ciklu, tas mainās atkarībā no katla pielāgošanas, dodot formu paredzētajiem mainīgajiem PWM impulsiem izejā.
Atzīmes / atstarpes attiecības vidējais rezultāts rada PWM izeju, kas savukārt kontrolē motora līdzstrāvas ātrumu.
PWM impulsi tiek padoti uz MOSFET vārtiem, kas reaģē un kontrolē pievienoto motora strāvu, reaģējot uz katla iestatīšanu.
Pašreizējais līmenis caur motoru izlemj tā ātrumu un tādējādi realizē kontrolējošo efektu caur katlu.
IC izejas biežumu var aprēķināt pēc formulas:
F = 1,44 (VR1 * C1)
MOSFET var izvēlēties atbilstoši prasībām vai slodzes strāvai.
Piedāvātā līdzstrāvas motora ātruma regulatora shēmu var redzēt zemāk:

Prototips:

Video testēšanas pierādījums:
https://youtu.be/M-F7MWcSiFYIepriekš minētajā videoklipā mēs varam redzēt, kā IC 555 bāzes dizains tiek izmantots līdzstrāvas motora ātruma kontrolei. Kā jūs varat redzēt, lai gan spuldze darbojas perfekti, reaģējot uz PWM, un tā intensitāte mainās no minimālā mirdzuma līdz maksimāli zemam, motors to nedara.
Sākotnēji motors nereaģē uz šaurajiem PWM, drīzāk sākas ar rāvienu pēc tam, kad PWM ir pielāgoti ievērojami lielākiem impulsu platumiem.
Tas nenozīmē, ka ķēdei ir problēmas, tas ir tāpēc, ka līdzstrāvas motora armatūra ir cieši turēta starp magnētu pāri. Lai sāktu startu, armatūrai ir jāpārvieto tā rotācija pāri abiem magnēta stabiem, kas nevar notikt ar lēnu un maigu kustību. Tas ir jāuzsāk ar vilci.
Tieši tāpēc motoram sākotnēji ir nepieciešami augstāki PWM pielāgojumi, un pēc rotācijas uzsākšanas armatūra iegūst zināmu kinētisko enerģiju, un tagad lēnāka ātruma sasniegšana kļūst iespējama, izmantojot šaurākas PWM.
Tomēr joprojām nav iespējams panākt rotāciju līdz tikko pārvietojošam lēnam statusam tā paša iemesla dēļ, kā paskaidrots iepriekš.
Es centos darīt visu iespējamo, lai uzlabotu reakciju un panāktu pēc iespējas lēnāku PWM vadību, veicot dažas modifikācijas pirmajā diagrammā, kā parādīts zemāk:

To sakot, motors varētu parādīt labāku vadību lēnākā līmenī, ja motors ir piestiprināts vai piestiprināts ar slodzi caur zobratu vai skriemeļu sistēmu.
Tas var notikt tāpēc, ka slodze darbosies kā amortizators un palīdzēs nodrošināt kontrolētu kustību lēnāka ātruma regulēšanas laikā.
3. dizains: IC 556 izmantošana uzlabotai ātruma kontrolei
Mainīgs līdzstrāvas motora ātrums var šķist, ka tas nav tik grūti, un jūs varat atrast tam daudz ķēžu.
Tomēr šīs shēmas negarantē konsekventu griezes momenta līmeni pie zemākiem motora apgriezieniem, padarot darbību diezgan neefektīvu.
Turklāt pie ļoti maziem apgriezieniem nepietiekama griezes momenta dēļ motors mēdz apstāties.
Vēl viens nopietns trūkums ir tas, ka šajās ķēdēs nav iekļauta motora maiņas funkcija.
Piedāvātajā shēmā nav nekādu iepriekš minēto trūkumu, un tā spēj radīt un uzturēt augstu griezes momenta līmeni pat ar zemāko iespējamo ātrumu.
Ķēdes darbība
Pirms mēs apspriežam ierosināto PWM motora kontroliera ķēdi, mēs vēlētos uzzināt arī vienkāršāku alternatīvu, kas nav tik efektīva. Tomēr to var uzskatīt par samērā labu, ja vien motora slodze nav liela un kamēr ātrums netiek samazināts līdz minimālajam līmenim.
Attēlā parādīts, kā vienu 556 IC var izmantot pievienotā motora ātruma kontrolei, mēs neiedziļināsimies. Vienīgais ievērojamais šīs konfigurācijas trūkums ir tas, ka griezes moments ir tieši proporcionāls motora ātrumam.
Atgriežoties pie ierosinātā lielā griezes momenta kontroliera ķēdes dizaina, šeit mēs izmantojām divus 555 IC, nevis vienu vai drīzāk vienu IC 556, kas satur divus 555 IC vienā iepakojumā.
Ķēdes shēma

Galvenās iezīmes
Īsumā ierosinātais DC motora kontrolieris ietver šādas interesantas funkcijas:
Ātrumu var nepārtraukti mainīt no nulles līdz maksimālajam, neieslīgstot.
Griezes momentu nekad neietekmē ātruma līmeņi, un tas paliek nemainīgs pat pie minimālā ātruma līmeņiem.
Motora rotāciju var pagriezt vai mainīt sekundes daļas laikā.
Ātrums ir mainīgs abos motora rotācijas virzienos.
Tie divi 555 IC tiek piešķirtas ar divām atsevišķām funkcijām. Viena sadaļa ir konfigurēta kā astabils multivibrators, kas ģenerē 100 Hz kvadrātveida viļņu pulksteņus, kas tiek padoti uz iepriekšējām 555 sekcijām iepakojuma iekšpusē.
Iepriekš minētā frekvence ir atbildīga par PWM biežuma noteikšanu.
Transistors BC 557 tiek izmantots kā pastāvīgs strāvas avots, kas tur blakus esošo kondensatoru pie kolektora sviras.
Tādējādi visā iepriekšminētajā kondensatorā tiek izveidots zāģa spriegums, ko 556 IC iekšpusē salīdzina ar parauga spriegumu, kas tiek parādīts ārēji pa rādīto tapu.
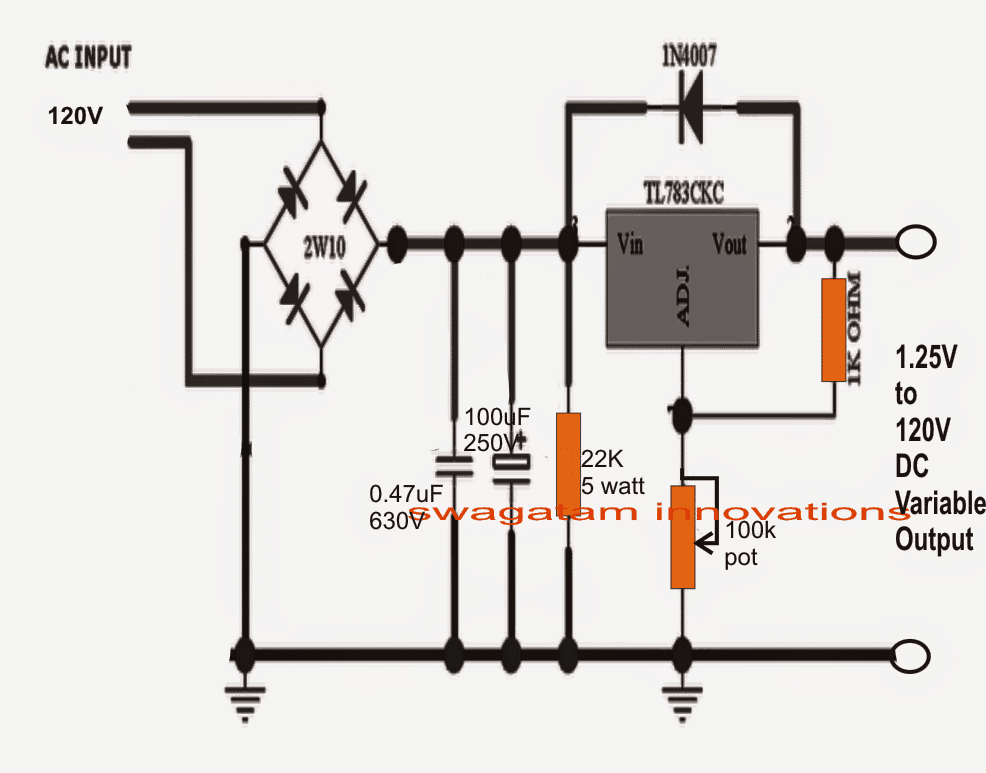
Ārēji piemēroto sprieguma paraugu var iegūt no vienkāršas 0–12 V mainīga sprieguma barošanas ķēdes.
Šis mainīgais spriegums, kas tiek piemērots 556 IC, tiek izmantots, lai mainītu impulsu PWM pie izejas un ko galu galā izmanto pievienotā motora ātruma regulēšanai.
Slēdzis S1 tiek izmantots, lai vajadzības gadījumā uzreiz mainītu motora virzienu.
Detaļu saraksts
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 omi,
- R7, R8, R9, R10 = 470 omi,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = SPDT pārslēdzējs
Iepriekš minētā shēma bija iedvesmota no šādas motora vadītāja shēmas, kas jau sen tika publicēta žurnālā elecktor electronic India.
Motora griezes momenta kontrolēšana, izmantojot IC 555

Pirmo motora vadības shēmu var daudz vienkāršot, izmantojot motora atpakaļgaitas darbībai DPDT slēdzi un ātruma vadības ieviešanai izmantojot izstarotāja sekotāja tranzistoru, kā parādīts zemāk:

Precīza motora vadība, izmantojot vienas opas pastiprinātāju
Ārkārtīgi izsmalcināta vai sarežģīta līdzstrāvas kontrole motoru varētu panākt, izmantojot op-amp un taho ģeneratoru. Op-amp ir uzstādīts kā sprieguma jutīgs slēdzis. Zemāk parādītajā ķēdē, tiklīdz tahogrāfa ģeneratora izeja ir zemāka par iepriekš iestatīto atsauces spriegumu, komutācijas tranzistors tiks ieslēgts un motors tiks nodrošināts ar 100% jaudu.
Op amp pārslēgšanas darbība notiktu tikai dažos milivoltos ap atsauces spriegumu. Jums būs nepieciešams divkāršs barošanas avots, kas var būt tikai stabilizēts.

Šis motora kontrolieris nodrošina bezgalīgi regulējamu diapazonu, neveicot nekādas mehāniskas problēmas.
Op amp izeja ir tikai +/- 10% no barošanas sliežu līmeņa, tādējādi izmantojot dubultā izstarotāja sekotāju, var kontrolēt milzīgus motora ātrumus.
Atskaites spriegumu var noteikt, izmantojot termistorus vai LDR utt. Eksperimentālajā shēmā norādītajā shēmā kā taho ģenerators tika izmantots RCA 3047A op amp un 0,25 W 6 V motors, kas ģenerēja ap 4V pie 13000 apgr./min. paredzētās atsauksmes.
Pāri: 3 labākās Džoula zagļa shēmas Nākamais: Spiediena katla svilpes skaitītāja ķēde