Rakstā ir izskaidrota vienkārša līnijas sekotāja transportlīdzekļa ķēde, kas pazīstama arī kā līnijas izsekošanas transportlīdzeklis, izmantojot tikai pāris op amperus un dažus citus komponentus, neizmantojot sarežģītus Arduino vai mikrokontrollerus.
Kas ir līnijas sekotāja transportlīdzeklis
Līnijas sekotājs ir automātiska vadāma transportlīdzekļa (AGV) veids, kas darbojas, atklājot uz zemes novilktu vai iestrādātu baltu līniju. Detektoru signāls liek motorizētiem riteņiem automātiski pagriezties un pielāgoties atbilstoši līnijai, radot iespaidu, ka transportlīdzeklis seko līnijai. Tādējādi nosaukums līnijas sekotājs.
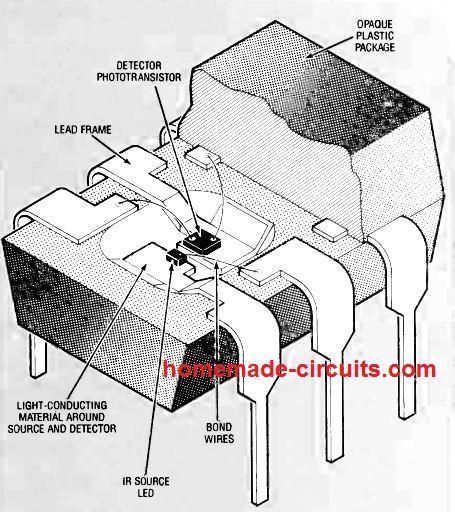
Būtībā detektori ir foto rezistori, piemēram, LDR vai pusvadītāju gaismas detektori, piemēram, fotodiodes vai fototransistori .
Pāris tādu gaismas detektori tiek izmantoti, kas nosaka atstaroto gaismu no baltās līnijas un pārslēdz tranzistorizētas ķēdes vai op amp balstītus salīdzinātājus, kas savukārt kontrolē transportlīdzekļa riteņu motorus, lai manevrētu atbilstoši zemes baltās līnijas pagriezieniem un līkumiem.
Izmantojot logu salīdzinātājus
Piedāvātajā līnijas sekotāja transportlīdzekļa ķēdē mēs esam izmantojuši pāris op amp salīdzinātāji bija iesaistīt motorus līdzsvarošanas darbībā.
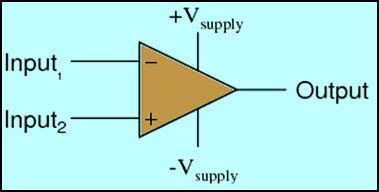
Op ampēri ir piekopti kā logs dalītāji . Kā norāda nosaukums, logu salīdzinātājs detektoru ieejas signālu salīdzina ar divām galējā sprieguma atsaucēm, kas veido “loga” sliekšņus. Kamēr ieejas signāla līmenis ir šajā “loga” atskaites sliekšņos, abu opu pastiprinātāju izeja saglabā augstu loģiku visos to izvados.
Tomēr, ja ieejas signālam ir tendence pārsniegt atskaites sliekšņus, attiecīgā op amp izeja kļūst zema, kā rezultātā op ampēri ir pretēji. Šī nelīdzsvarotība liek izvades ierīcēm labot situāciju, atbilstoši pārslēdzot slodzes.
Kā darbojas ķēde
Atsaucoties uz zemāk redzamās līnijas sekotāja transportlīdzekļa shēmu, mēs varam redzēt divus op amperus, kas konfigurēti kā loga kompresori.

Op ampēri var būt no IC LM358 vai LM324
Augšējais op amp ir vads, lai kontrolētu augšējo sliekšņa robežu, bet apakšējais op amp ir pievienots, lai kontrolētu apakšējo sliekšņa robežu.
Op amp A1 invertējošā ieeja un op amp A2 neinvertējošā ieeja ir piestiprināta ar fiksētu atskaites spriegumu
Op amp A1 neinvertējošā ieeja un op amp A2 apgrieztā ieeja ir sasietas kopā un tiek izmantotas gaismas detektoru ievades signāla variāciju uztveršanai.
Divi gaismas atkarīgie rezistori, LDR1 un LDR2, kas darbojas kā gaismas jutīgas ierīces, tiek novietoti kā gaismas detektori tā, lai tie atstaro atstaroto gaismu no baltās līnijas vienmērīgi uz tiem.
Kamēr gaisma uz LDR ir pietiekami augsta un vienmērīga, A1 pin3 ir augstāks nekā pin2, jo LDR1 ir piestiprināts ar pozitīvo līniju. Tas izraisa tā produkcijas pieaugumu.
Tāpat A2 pin6 tiek turēts zemāk par pin5, pateicoties LDR2 savienojumam ar iezemēto līniju, un tas ļauj A2 izvadam palikt augstam.
Citiem vārdiem sakot, kad LDR ir vienmērīgi apgaismoti, abu opu pastiprinātāju neinvertējošās (+) ieejas tiek turētas augstāk nekā to invertējošās (-) ieejas, izraisot to izejas pieaugumu.
Ja abas izejas ir augstas, tranzistora vadītāji uztur attiecīgos motorus vienmērīgi, kas attiecīgi ļauj transportlīdzeklim vienmērīgi darboties pa taisnu līniju.
Kā transportlīdzeklis seko līnijai
Sastopoties ar izliektu baltu līniju, viena no LDR novirzās no līnijas, izraisot gaismas atšķirību ķēdes A punktā. Pēc tam attiecīgā op amp izeja samazinās un attiecīgais motors īslaicīgi apstājas.
Šajā situācijā otrs sānu motors, kas joprojām darbojas, liek transportlīdzeklim pagriezties uz līnijas lieces leņķa pusi, kas aizēnoto LDR atgriež baltās līnijas apgaismotajā apgabalā. Kad tas notiks, abi motori atkal sāk darboties, ļaujot transportlīdzeklim darboties normāli.
Iepriekš minētā automātiskā ieslēgšanas / izslēgšanas pārslēgšanās pa kreiso / labo motoru, reaģējot uz gaismas svārstībām no saliektām baltām līnijām, liek transportlīdzeklim turpināt pielāgoties un manevrēt atbilstoši baltajai līnijai.
Kā izveidot transportlīdzekli
Vienā no maniem iepriekšējiem ierakstiem mēs uzzinājām, kā a vienkāršs tālvadības transportlīdzeklis varētu uzbūvēt, izmantojot tikai pāris motorus, kas piestiprināti taisnstūra dēļa aizmugurējai malai, un pāris manekena riteņus dēļa priekšējā malā.

Arī attiecībā uz piedāvāto līnijas sekotāju transportlīdzekļa ķēdi mēs izmantojam līdzīgu transportlīdzekļa konstrukciju, kā parādīts iepriekš redzamajā attēlā.
Izkārtojums izskatās diezgan vienkāršs, aizmugurējie riteņi ir piestiprināti ar motoriem, kurus tranzistora vadītāji kontrolē visā op amp izejās.
Kad transportlīdzeklis novirzās no līnijas, gaismas līmeņa atšķirība uz LDR izslēdz vienu no op ampēriem, apturot attiecīgo motoru.
Tas liek pretējam sānu motoram, kas darbojas, pagriezties uz apturētā motora pusi, tas nozīmē, ja kreisās puses motors tiek bremzēts, transportlīdzeklis būs spiests tajā pašā virzienā pagriezties pa kreisi, pielāgojoties lieces līnijai.
Tas arī liek domāt, ka kreisās / labās puses motora integrācija ar opamp amp izejām būtu jāveic atbilstoši tā, lai līnijas un apstādinātā motora lieces virziens būtu vienā un tajā pašā transportlīdzekļa pusē.
Kā novietot LDR
Tā kā domājams, ka abas LDR (LDR1 un LDR2) vienmērīgi uztver atstaroto gaismu no baltās līnijas, to orientācijai jābūt perpendikulārai līnijas garumam, kā parādīts zemāk.

Šeit mēs esam pieņēmuši, ka transportlīdzeklis brauc no labās uz kreiso pusi, pa noteikto līniju pa to pašu ceļu.
LDR kopējam platumam jāietilpst līnijas platumā.
LDR un LED jāuzstāda transportlīdzekļa apakšējā virsmā un vēlams aizmugurē, tieši zem aizmugurējo riteņu komplekta.
Norādītais LED ir balts LED ar sērijas 1K rezistoru. Tam jābūt novietotam tuvu LDR un centrā, nodrošinot, ka gaisma no LDR nenonāk tieši LDR, tā vietā gaismai jāsasniedz LDR, atstarojoties no baltās līnijas zem tām.
Motora specifikācijas
Motori var būt jebkura veida pastāvīgi magnēti ar suku, taču tiem jābūt aprīkotiem ar pārnesumkārbu, lai nodrošinātu, ka transportlīdzekļa kustība ir atbilstoši lēna un vienmērīga.
Motora jaudai ir jāatbilst slodzei, kuru paredzēts pārvadāt transportlīdzeklim. To var pārbaudīt, veicot dažus praktiskus eksperimentus.
Kā iestatīt
Lai izveidotu šo līnijas sekotāja transportlīdzekļa ķēdi, jums būs jāorganizē neliela baltas līnijas josla, kas nokrāsota uz līdzenas virsmas, vai balta lente, kas iestrēdzta uz līdzenas virsmas.
Novietojiet sistēmu (bez riteņiem) virs līnijas, kā norādīts iepriekšējā diagrammā, tā, lai LDR un LED ir pareizi noregulēti līnijas platumā.
Ieslēdziet strāvu, baltajai gaismas diode spilgti izgaismo zonu zem tā. Pielāgojiet abus iepriekš iestatītos iestatījumus, līdz abi motori tiek ieslēgti vienlaicīgi.
Tagad nedaudz pārvietojiet ierīci pa labi, lai LDR1 pārvietotos no baltās līnijas.
Kreisajam motoram vajadzētu apstāties. Ja tas nenoregulē P1, līdz kreisais motors vienkārši apstājas.
Pēc tam nedaudz pārvietojiet ierīci pa kreisi, lai LDR2 pārvietotos no baltās līnijas. Tam vajadzētu apturēt labās puses motoru. Ja tas netiek noregulēts, iestatiet 10 k iepriekš iestatīto iestatījumu, līdz labās puses motors vienkārši apstājas.
Tas pabeigs iestatīšanas procedūras, un tagad jūs varat uzstādīt riteņus uz motoriem un izmantot šo vadāmo transportlīdzekli, lai automātiski sekotu noteiktai sliedei uz zemes.
Baltā līnija pret melno līniju
Piedāvātā līnijas sekotāja transportlīdzekļa sistēma balstās uz baltu līniju, kas iestrādāta zemē, nevis melnu līniju. Baltās līnijas, nevis melnās līnijas izmantošanas priekšrocība ir šāda:
Balta līnija izskatās elegantāka un pienācīgāka, salīdzinot ar melno līniju.
Baltās līnijas līnijas sekotājs var strādāt pat pilnīgā tumsā vai vājos apkārtējos apgaismojumos. Lai saglabātu transportlīdzekļa darbību, uz melnām gaismām balstītiem dizainiem parasti ir nepieciešams ārējs apgaismojums.
Balto līniju AGV darbojas precīzāk neatkarīgi no flīžu krāsas, izņemot flīzes, kas ir ārkārtīgi baltas vai līdzvērtīgas baltās līnijas krāsai.
Transportlīdzekļa pārveidošana par melnās līnijas sekotāju
Neskatoties uz iepriekšminētajām priekšrocībām, ja lietotājs dod priekšroku, lai transportlīdzeklis sekotu melnajai līnijai, sistēmu varētu viegli pārveidot, lai to izdarītu, veicot dažas ātras modifikācijas ierosinātajā dizainā.
Lietotājs vienkārši apmainās vai nomainīs op pastiprinātāju ievades kontaktu savienojumus ar iepriekš iestatītajiem un noņemtu ar LDR saistīto gaismas diode.
Pāri: 50 vatu sinusa viļņu UPS ķēde Nākamais: Pamata elektronisko shēmu paskaidrojums - iesācēju ceļvedis elektronikā