Šajā amatā mēs izpētām, kas ir BLDC motors, un pēc tam mēs uzzinām par BLDC bez sensora motora vadītāja shēmas dizainu.
BLDC CPU ventilatori
Vai esat redzējuši tos ātri kustīgos ventilatorus centrālajos procesoros, sprieguma stabilizatoros, DVD atskaņotājos un citās līdzīgās iekārtās, kas strādā ar vislielāko efektivitāti, patērē minimālu vietu, strāvu un tomēr spēj veikt svarīgās darbības, kā noteikts konkrētajam aprīkojumam?
Jā, šīs ir visas BLDC ventilatoru vai bezkontaktu līdzstrāvas motoru modernās versijas, kas ir daudz pārākas par vecajiem tradicionālajiem matiem.

Attēla pieklājība: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Tomēr BLDC motoram būs nepieciešama sarežģīta draivera shēma, un jā, visos šajos CPU ventilatoros ir iebūvēti šie draiveru moduļi, lai gan tie, šķiet, ir viegli darbināmi, izmantojot parasto līdzstrāvu, iekšēji sistēma jau ir aprīkota ar viedo ķēdi.
BLDC motora draiveris
Šeit mēs uzzināsim par vienu šādu viedo BLDC motora draivera shēmu, izmantojot vienu mikroshēmu DRV10963 jebkura maza BLDC motora vadīšanai ar neticamu efektivitāti, un vēlāk vienā no gaidāmajiem rakstiem mēs redzēsim, kā šo IC ķēdi var uzlabot, lai vadītu pat spēcīgi augstas strāvas BLDC, piemēram, tādi, kādi ir izmanto kvadrokopteros.
Bet pirms tam būtu interesanti uzzināt mazliet par BLDC motoriem.
Atšķirība starp sukotajiem un bez suku līdzstrāvas motoriem
Atšķirība starp suku motoru un bezkontakta motoru un efektivitātes līmeni ir diezgan acīmredzama.
Tā kā matētiem motoriem brūces armatūra pati pārvietojas starp magnētiem, ir jāizmanto “otas” (berzes kontakti), lai kustīgās spoles spailes spētu pastāvīgi uztvert barošanas spriegumu, pašiem nenonākot līdz barošanas avotam, kas citādi padarītu strādāt neiespējami un apdraudēt darbības.
Bezkontakta motorā spole vai tinums nekad nekust un ir nemainīgs, šeit rotors nes pastāvīgu magnētu komplektu un rotē apkārtējo tinumu magnētisko plūsmu ietekmē.
Tā kā magnēts ir brīvs no visām grūtībām un spēj darboties, nepiesaistot terminālus, lai pārvaldītu vai saņemtu enerģiju, tas var darboties bez piepūles, griežoties lielā ātrumā un praktiski bez trokšņa līmeņa.
Bet šeit ir nozveja. Lai elektromagnēts reaģētu uz pastāvīgā magnēta plūsmām, magnētiskās fāzes vai stabu maiņai jābūt pastāvīgai, lai abi kolēģi spētu pastāvīgi reaģēt un iziet cauri pretējam spēkam, tādējādi atbrīvojot nepieciešamo vērpes spēku virs rotoru un izpildiet rotāciju ar iegūto griezes momentu.
Ar matētu motoru tas kļūst vieglāk, pateicoties armatūras spoles pašregulējošajai īpašībai, kas spēj griezties un radīt pašpietiekamu pretēju magnētisko spēku un turpināt griezties bez jebkādiem ārējiem impulsiem vai apstrādes.
Tomēr BLDC tas kļūst par problēmu, jo magnēta rotors paliek “bezspēcīgs” un prasa tinuma aprēķinātu magnētisko komandu, lai rotētu jēgpilni, nevis nejauši.
Tieši tāpēc visiem BLDC motoriem obligāti nepieciešama motora vadītāja ķēde, lai komandētu trīs atšķirīgus tinumu komplektus motora iekšpusē.
Tādējādi visi BLDC būtībā ir trīsfāžu motori, un rotācijas griezes momenta radīšanai obligāti nepieciešamas 3 fāzes.
Ko dara bez sensora BLDC draiveri
Sensors bez BLDC vadītāja ķēdes vienkārši secīgi elektrificē 3 tinumu komplektus tā, ka magnētiskais rotors spēj iziet cauri konsekventam pretējam spēkam, ļaujot motoram sasniegt noturīgu griezes momentu un rotācijas spēku.
Bet šo secīgo BLDC tinumu barošanu ar ķēdi nevar iestatīt tikai pēc nejaušības principa, tam jābūt tandēmā vai kā atbildei uz rotora magnēta rotācijas stāvokli, pretējā gadījumā ieviešana varētu notikt nevienmērīgi, un mēs varam būt liecinieki motora vārpstai (rotors ) rotē nejauši, tas ir, raustīšanās starp pulksteņrādītāja kustības virzienu un pretēji pulksteņrādītāja virzienam bez saprātīgas rotācijas.
Kāpēc BLDC motoros tiek izmantoti sensori
Tāpēc mēs ieviešam sensorus, kas izvietoti daudzu BLDC motora variantu iekšienē, šie sensori (parasti Hall efekta sensori) “saprot” rotora magnēta magnētisko polu mainīgo stāvokli, uzdod pievienoto procesora ķēdi elektrificēt atbilstošo tinumu un izpildīt rotācijas kustību. ar optimālu griezes momentu.
Hall efekta sensori tiek efektīvi izmantoti lielākajai daļai BLDC motoru, kuru izmērs ir salīdzinoši lielāks, bet mazākiem motoriem, piemēram, CPU ventilatoriem, CPU diskdziņiem, DVD atskaņotājiem, maziem izplūdes ventilatoriem, kvadropteros izmantojamiem motoriem Hall efekta sensori var kļūt nepiemēroti un tāpēc tiek ieviesta alternatīva pieeja bez sensora.
Tas ietver tinuma raksturīgās aizmugurējās EMF elektroenerģijas izmantošanu, kas tiek uzskatīta par atsauces avotu attiecīgo tinumu komplektu apstrādei un elektrificēšanai un rotācijas griezes momenta izpildei.

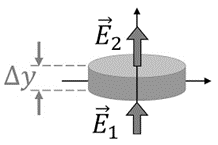
BLDC rotora kustības imitēšana
Iepriekš minētajā neapstrādātajā simulācijā mēs varam vizualizēt, kā atbrīvotais aizmugurējais EMF tiek ņemts par atskaiti un tiek izmantots sekvencēšanas impulsu ražošanai nākamajiem tinumu komplektiem, uzliekot rotējošo griezes momentu centrālajam pastāvīgā magnēta rotoram. Simulācija, iespējams, nav precīza replikācija, tomēr tā dod aptuvenu priekšstatu par darbības principu.
Interesanti atzīmēt, ka impulss tiek pārslēgts, kad magnēta N / S atrodas tieši tinuma kodola centrā, kas ļauj tinumam vai nu enerģēt kā N vai S atkarībā no impulsa polaritātes, un radīt pievilcīgu un atgrūdošu impulsu spēku uz N / S magnētiem, tādējādi radot nepieciešamo griezes momentu maksimāli iespējamajā līmenī.
Un tas savukārt kļūst iespējams, pateicoties aizmugurējam EML, kas atbrīvots, pārslēdzot iepriekšējo tinumu.
Iepriekš minētā diskusija paskaidro sensora darbību ar mazāku BLDC motoru. Tagad uzzināsim, kā noteiktā shēma apstrādā iepriekš minēto sarežģīto trīsfāzu komutācijas izpildi
BLDC draiveris DRV10963
Pēc nelielas meklēšanas es atradu šo bez sensora BLDC draivera shēmu, izmantojot vienu mikroshēmu DRV10963, kas konfigurācijā izmanto nenozīmīgu daļu detaļu un tomēr spēj ieviest sarežģītu apstrādi paredzētajām darbībām.
DRV10963 ir vismodernākā mikroshēma, kas īpaši izstrādāta, lai darbinātu mazāk sensoru ar BLDC motoriem, tikai paredzot aizmugurējo EMF no motora tinuma un izpildot precīzu komandu tinumam un panākot optimālu rotācijas griezes momentu virs rotora.
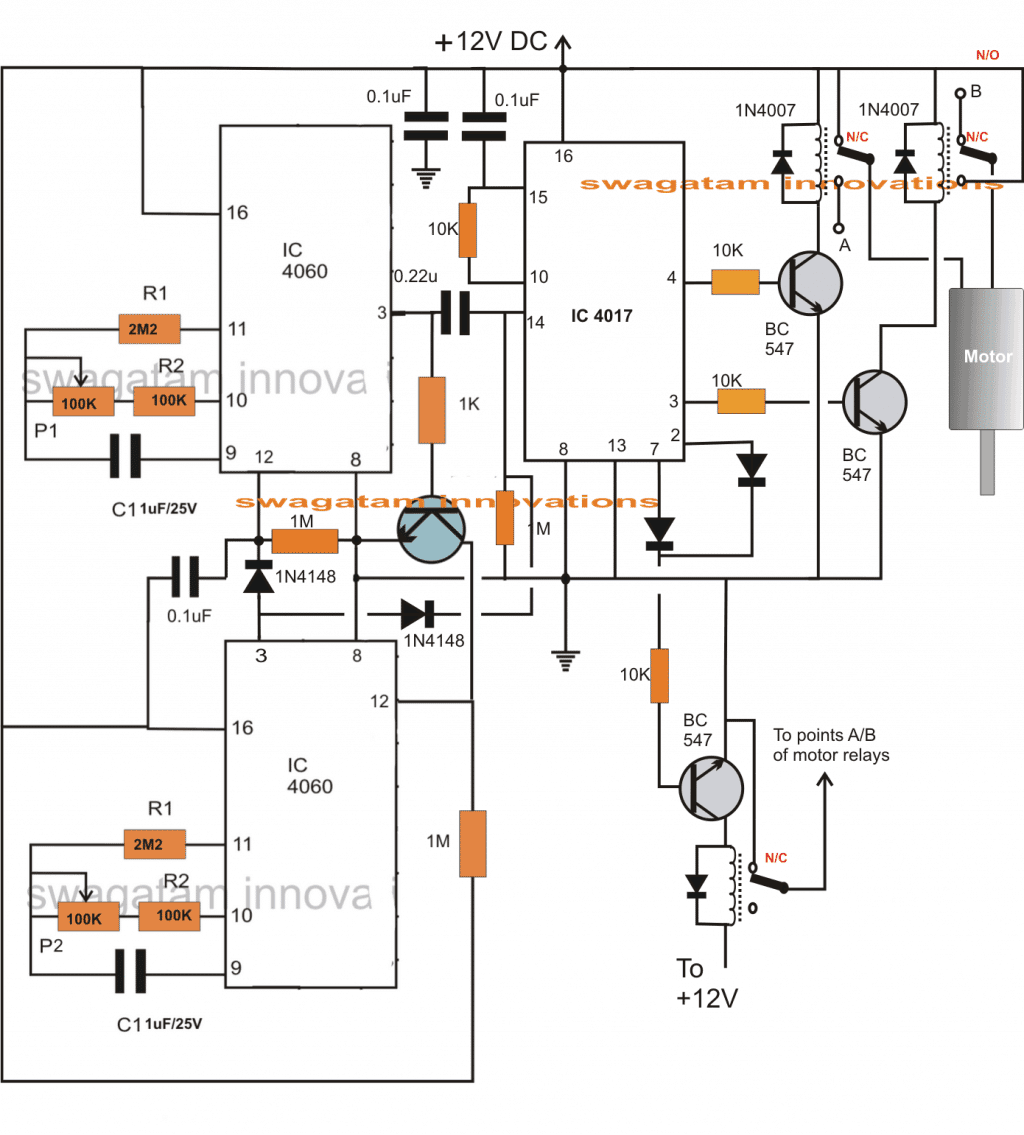
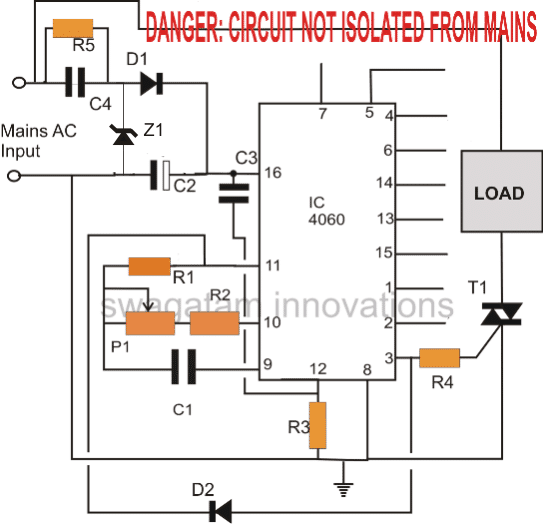
Ķēdes shēma

Iepriekš redzamajā attēlā parādīts vienkāršs ķēdes izkārtojums, kas acīmredzami neietver neko citu kā pašu IC.
Dažādās kontaktligzdas tiek piešķirtas noteiktu funkciju veikšanai, piemēram, motora PWM ātruma kontrolei, virziena kontrolei utt., Vienkārši padodot attiecīgos kontaktus ar norādītajiem datiem no ārēja avota.
Šajā attēlā ir redzama mikroshēmas pakete, kas izskatās kā 10 kontaktu DIL IC, un tās pašas dažādas izvilkšanas funkcijas var izpētīt no datiem, kas sniegti diagrammā:

Atsaucoties uz ierosinātās BLDC draivera bez sensora shēmas shēmu kā parādīts iepriekšējā rakstā un arī mikroshēmas attēlā iepriekš, informāciju par pinouts var saprast šādi:
Sīkāka informācija par IC Pinout
FG = Tas ir motora ātruma indikatora tapa (izeja), kas tiek piekrauts atvērtā kolektora režīmā ar iekšējo BJT.
Atvērtais kolektors nozīmē, ka šī pinout izeja radīs negatīvos PWM, izmantojot grimšanas loģiku visā atvērtajā kolektorā un zemē, tādējādi, lai iegūtu derīgu nolasījumu, lietotājam būs jāpievieno pievilkšanas rezistors visā atvērtajā kolektorā un pozitīvais padeve (5V ), lai veiktu ātruma indikāciju pie šīs kontaktligzdas.
FGS = Tā ir ātruma indikatora selektora ieeja, kas nozīmē, ka šeit var tikt ieviesta augsta vai zema loģika indikatora tapas FG ieslēgšanai / izslēgšanai.
Vcc = pozitīvais pievads IC, lai tas darbotos, nedrīkst pārsniegt 5V.
W, U un V ir 3 fāžu izejas BLDC motoram, kuru paredzēts darbināt caur šo IC. Tas darbojas arī kā ievades motora EMF impulsu noteikšanai vajadzīgajai sinhronizētajai motora spoles pārslēgšanai.
GND = Attiecas uz IC negatīvo padeves pievadu attiecībā pret Vdd tapu.
FR = Palīdz izvēlēties vai komandēt motora virzienu, un to var dinamiski mainīt jebkurā laikā, kad sistēma ir ieslēgta, vienkārši ieviešot ārēju loģiku augstu vai zemu loģiku.
PWM = Tas apzīmē PWM vadības ievadi no ārējais PWM viļņu formas ģenerators.
Šī PWM ieeja var būt mainīga, lai ieviestu pievienotā BLDC motora vēlamo ātruma kontroli.
Punktēta vieta mikroshēmas centrā norāda termisko spilventiņu, kuru var saspiest vai nospiest ar radiatoru, lai iegremdētu mikroshēmā iespējamo siltuma veidošanos, kamēr to izmanto ar piekrautu BLDC motoru.
Iepriekš minētajā diskusijā ir norādīts BLDC bez sensora motora draivera mikroshēmas DRV10963 pieslēgums vai savienojuma detaļas, tagad detalizēti analizēsim mikroshēmas iekšējo konfigurāciju un darbību, izmantojot šādus punktus:
Ierīces apraksts
DRV10963 ir trīsfāžu elektromotora operators bez sensoriem ar iebūvētiem jaudas MOSFET (trīsfāzu H-tilts). Tas ir pielāgots augstākai produktivitātei, samazinātam troksnim un minimālam sekundāro materiālu skaita motora piedziņas funkcijām. Ekskluzīvā bez sensora loga-bez 180 ° sinusoidālās vadības shēma nodrošina motora pārvietošanās efektivitāti bez trokšņiem.
DRV10963 sastāv no viedās bloķēšanas noteikšanas funkcionalitātes, kas kopā ar iebūvētām papildu drošības ķēdēm nodrošina drošu veiktspēju. DRV10963 var atrast termiski efektīvā 10 kontaktu USON iepakojumā ar nesegtu termisko paklāju.
Kā darbojas IC
DRV10963 produkts ir trīsfāzu bez sensora motora operators ar ievadītu jaudu MOSFET
radīts īpaši izcilai veiktspējai, samazinātai rezonansei un minimālai virszemes daļu skaita motora piedziņas funkcijām.
Galvenais bez sensora bez logiem 180 ° sinusoidālās vadības plāns parāda trokšņainu motora darbību, saglabājot nominālo elektriski stimulēto griezes momenta pulsāciju. Pēc inicializācijas ierīce DRV10963 gatavojas pagriezt motoru kursā, kas norādīts caur FR ievades tapu.
DRV10963 mikroshēma darbosies ar 3 fāžu BLDC motoru, izmantojot sinusoidālās vadības plānu.
Izmantoto sinusoidālo fāžu spriegumu nozīme ir atkarīga no PWM tapas darba cikla. Kamēr motors pārvietojas, DRV10963 IC piegādā ātruma datus pie FG tapas.
DRV10963 vienība sastāv no viedās bloķēšanas sajūtas spējas. Tādā gadījumā, kad motoru apstādina svešs spiediens, programma identificēs bloķēšanas problēmu un veiks pasākumus, lai aizsargātu sevi kopā ar motoru.
Slēdzenes noteikšanas ķēdes īpašā procedūra ir detalizēti attēlota bloķēšanas noteikšanā. DRV10963 IC turklāt ietver vairākas iebūvētas drošības shēmas, piemēram, strāvas aizsardzību, pārsprieguma aizsardzību, zem sprieguma aizsardzību un aizsardzību pret temperatūru.
Raksturīgs skaidrojums
Ātruma ievade un vadība
DRV10963 piedāvā trīsfāzu 25-kl-lz PWM izejas, kurām var būt standarta sinusoidālu viļņu procentuālā daļa no fāzes uz fāzi. Ja kāds cikls tiek noteikts attiecībā uz zemi, iespējams, ka atklātā viļņu forma ir PWM aizsargāta sinusoīda kombinācijā ar 3. kārtas harmonikām, kā parādīts 2. attēlā.

Šī kodēšanas stratēģija racionalizē draivera specifikācijas tāpēc, ka, iespējams, bieži būs viena fāzes izeja, kas varētu būt vienāda ar nulli.
Rezultāta amplitūda mainās atkarībā no barošanas sprieguma (VCC) un pilnvarotā PWM darba cikla (PWM), kā noteikts 1. vienādojumā un uzsvērts 3. attēlā. Optimālā amplitūda tiek ieviesta, kad norādītais PWM darba cikls ir 100 PERCENT.
Vphpk = PWMdc>

Motora ātrumu neregulē tieši, izmantojot PWM, lai regulētu motoram izmantoto fāzes spriegumu amplitūdu.
PWM ievades darba cikls tiek pārveidots par 9 bitu digitālo daudzumu (no 0 līdz 511).
Regulējuma izšķirtspēja ir 1/512 == 0,2%. Darbības cikla analizators atvieglo sākotnējo pasūtījumu apmaiņas darbību starp ievades darba ciklu un 9 bitu digitālo skaitli.
Tas ir izcelts 4. attēlā, kurā r = 80 ms.

Apmaiņas veiktspēja starp PWM pasūtīto darba ciklu kopā ar izejas maksimālo amplitūdu ierīcē DRV10963 ir mainīga.
Rezultāta maksimālo amplitūdu apspriež 1. vienādojums, kad PWM komanda> minimālais funkcionālais darba cikls. Zemākais darbības darba cikls bieži tiek noteikts līdz 13%, 10%, 5% vai bez ierobežojumiem ar OTP iestatījumu (MINOP_DC1: 0).
1. tabulā ir parādītas ieteicamās konfigurācijas minimālajam darba ciklam.
Ikreiz, kad PWM norādītais darba cikls ir mazāks par zemāko darba ciklu un pārsniedz 1,5%, jauda tiks regulēta minimālajā darbības ciklā. Jebkurā laikā, kad ieejas darba cikls ir mazāks par 1,5%, ierīce DRV10963, iespējams, nedarbinās izvadi un tiek nosūtīta gaidīšanas režīmā.
To var ilustrēt 6. attēlā.

Rotācijas konfigurācijas
DRV10963 iedarbinās motoru, izmantojot 7. attēlā detalizēti aprakstītu paņēmienu.

Motora inicializācijas grafiks sastāv no ierīcē konfigurējamām alternatīvām atvērtas cilpas slēgšanas cilpas pārslēgšanas robežai (HOW.), Izlīdzināšanas laikam (TAHQH) un paātrinājuma ātrumam (RACE).
Lai rotoru sakārtotu pēc komutācijas loģikas, DRV10963 veic x% darba ciklu V un W fāzēm, vienlaikus kontrolējot U fāzi GND.
Šis scenārijs tiek saglabāts TAIign sekundes. X% nozīmīgumu identificē pēc VCC sprieguma (kā parādīts 2. tabulā), lai saglabātu lielu rotācijas griezes momentu dažādos dažādos barošanas spriegumos.
Kad izlīdzināšanas secība ir pabeigta, motors ir spiests paātrināties, uzliekot sinusoidālos fāzes spriegumus ar maksimālajiem līmeņiem, kā parādīts 2. tabulā, un palielinot, izmantojot komutācijas diapazonu ar paplašināšanas ātrumu, ko attēlo RACE, līdz komutācijas līmenis pieaug līdz Hom ., Hz.
Tiklīdz šī robeža ir sasniegta, DRV’l0963 tiek pārveidots slēgtā cikla režīmā, kurā komutācijas piedziņas progresēšanu atpazīst iebūvētais vadības algoritms, bet izmantoto spriegumu identificē PWM pilnvarotā darba cikla ieeja.
Atvērtās cilpas slēgšanas cilpas maiņas robežu (Hom), izlīdzināšanas laiku (TAHQH) un paātrinājuma ātrumu (RACE) var konfigurēt, izmantojot OTP konfigurācijas.
Pārsūtīšanas sliekšņa (HOW,) izvēli parasti apstiprina izmēģinājumu un kļūdu novērtējums. Mērķis būtu dot priekšroku nodošanas pielaidei, kas varētu būt pēc iespējas mazāka un kas ļautu motoram bez piepūles un uzticīgi pārslēgties starp atvērtās cilpas paātrinājumu un slēgtās cilpas paātrinājumu.
Parasti palielināta ātruma motoriem (maksimālais ātrums) ir nepieciešama augstāka nodošanas pielaide, jo paaugstināta ātruma motori satur samazinātu Kt, līdz ar to pieejamāku BEMF.
3. tabulā ir parādītas konfigurējamās pārsūtīšanas pielaides preferences. Lielākais ātrums elektriskajā Hz ir pierādīts kā atsauce, lai palīdzētu izvēlēties vēlamo nodošanas ātrumu konkrētai iesniegšanai.

Izlīdzināšanas laika (TAHQH) un paātrinājuma ātruma (RACE) izvēle var būt atkarīga pat no izmēģinājuma un kļūdu pārbaudes.
Motori ar lielāku inerci parasti prasa ilgāku izlīdzināšanas laiku un lēnāku ātruma palielināšanas ātrumu, atšķirībā no motoriem ar zemu inerci, kas parasti prasa īsāku izlīdzināšanas laiku kopā ar ātrāku paātrinājuma procentu. Programmas kompromisi ir jāīsteno, lai izmantotu sākuma stabilitāti, nevis pagrieziena periodu.
TI apstiprina, sākot ar lēmumu par mazāk intensīvām konfigurācijām (lēnāku RACE un ievērojamu Tmign), lai samazinātu griezes momenta palielināšanas laiku, atbalstot maksimālo izpildes līmeni.
Tiklīdz ir apstiprināts, ka iekārta darbojas apzinīgi, papildus spēcīgās konfigurācijas (lielāku RACC un mazāku TAHQH) var izmantot, lai mazinātu ieslēgšanās brīdi un vienlaikus piesardzīgi sekotu izpildes līmenim.
4. tabulā parādīti konfigurējamie TA'g ,, un RACE iestatījumi.

Pārējā skaidrojuma daļa par šo bez sensora BLDC IC ir sniegta šajā sākotnējā datu lapā
Lūdzu, nekautrējieties komentēt, lai uzzinātu vairāk par iepriekš apspriesto sensoru bez BLDC motora draivera ķēdes informāciju
Pāri: 12V LED mugursomas barošanas ķēde Nākamais: Quadcopter tālvadības shēma bez MCU