Ziņā ir izskaidrota vienkārša līnijas lāzera vadīta motora draivera shēma, kas darbojas, reaģējot uz precīzu horizontālu lāzera līniju, kas ģenerēta no līnijas lāzera līmeņa ierīces, un ar ārkārtīgu pilnību un precizitāti automātiski pielāgo pievienotā instrumenta vai darba darbu.
Kas ir līnijas lāzers
Līnijas lāzera aprīkojums ir augstas precizitātes galdnieku vecuma vecā līmeņrades elektroniskā nomaiņa.
Līnijas lāzera ierīce faktiski ir uzlabota lāzeru izstarojoša iekārta, kas var radīt 360 ° augstas precizitātes apgaismota horizontāla lāzera līnija, lai kalibrētu atsauci uz visiem rūpniecības vai būvniecības inženiertehniskajiem darbiem, lai darba gala rezultāts būtu pilnīgi taisns un izlīdzināts bez mazākām kļūdām.
Shēmu pieprasīja viens no veltītajiem šī emuāra lasītājiem Rafala kungs.
Detalizētas diskusijas par līnijas lāzera kontrolēta motora darba kārtību var uzzināt no šādiem punktiem:
Dizaina mērķis
Mr. Rafals: Esmu ļoti jauns šajā jautājumā. Pēdējo nedēļu laikā esmu veicis dažus pētījumus un neesmu atradis tieši to, kas man vajadzīgs.
Būšu pateicīga par jebkuru palīdzību. Es pievienoju savas idejas fotoattēlu. Es vēlos vadīt divus 12 V līdzstrāvas motorus ar lāzera līmeni.
Līnijas lāzera līmenis signalizēs uztvērējus.

Tad šim signālam būs jākontrolē 12 V līdzstrāvas motora virziens. Motors pagriež vītņoto stieni uz priekšu un atpakaļ, lai pielāgotu instrumenta augstumu.
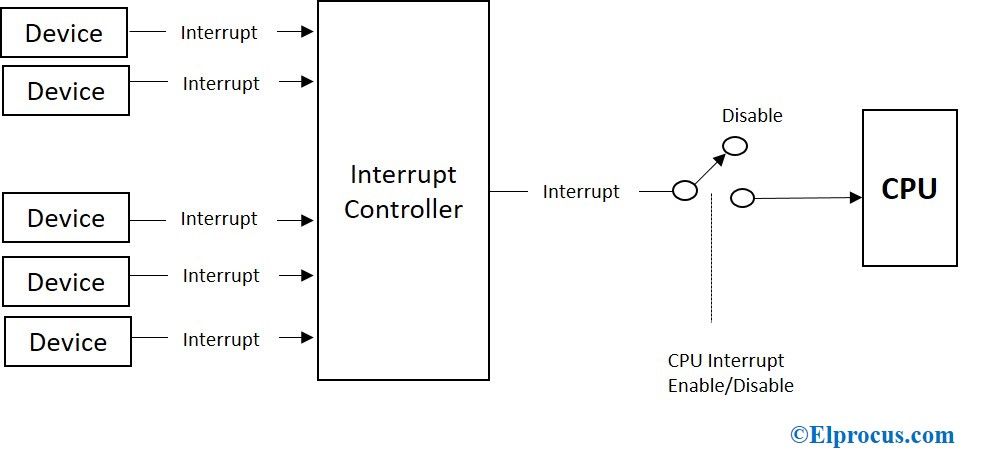
No tā, ko es atklāju, būtu vairākas paralēli savienotas fotodiodes, no kurām viena būtu noteikta lāzera noteikšanai virs nulles līmeņa un otra zem šī līmeņa. Nulles līmenis ir tikai sava veida pauze starp fotodiodēm, lai sistēma nepamodinātu. Lāzera sensors bez displeja. Es iedevu tikai attēlu.
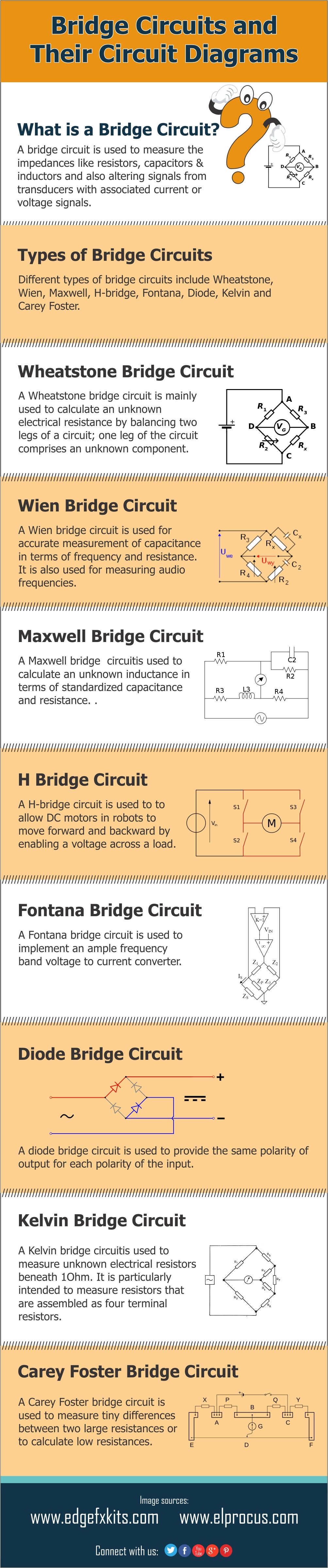
Man ir nepieciešama H tilta shēma, bet visas manis atrastās ir jāizmanto ar Arduino sistēmu. Ja nepieciešams, es varu iegādāties gatavu tiltu par saprātīgu cenu līdz 30 USD
Ideālā gadījumā tas darbotos gan ar sarkanajiem, gan zaļajiem lāzeriem, taču viļņu garumi ir tik atšķirīgi, ka es šaubos, vai to varētu izdarīt, un tas nedarbotos visā gaismas spektrā.
Sākotnēji es vēlētos iestatīt šī staru līmeni, kas piestiprināts motoriem ar augšupvērstajām pogām. Es būtu priecīgs, ja otrais motors pēc tam uzstādītu to ar žiroskopu, taču bez Arduino tas varētu būt ļoti grūti.
Es jūtu, ka tas, ko es cenšos darīt, ir tik vienkāršs, ka es varu izkļūt, neizmantojot Arduino. Un es uzstāju uz analogu, ņemot vērā sarežģītos apstākļus būvlaukumā, un man šķiet, ka jo vairāk elektronikas, jo neuzticamāka ierīce.
Tas darbosies tikai telpās, un lāzera attālums ir max 10m. Motoram, kuru es atradu sākumā, ir liels strāvas patēriņš 200mA max 2,19 A, bet arī liels griezes moments.
Jauda 18 V DC no Makita akumulatora.
Jau iepriekš pateicos par ieteikumiem.
Sveiciens no Polijas
Rafals
Pārvelciet : Man ir neskaidrības par motora vārpstu darbību. Vītņotā skrūve abos motoros virzīs instrumentu, bet tā nevar to atvilkt? Kā tas notiek?
Vai ir iespējams to pašu ieviest ar vienu motoru?
Mr. Rafals: Zemākas izlīdzināšanas taisnes būtu varbūt 70 cm, tikai mazām telpām, piem. tualeti, lai jūs varētu iekļūt pa durvīm.
Mašīna bez piedziņas, ar roku vilkta, tikai izlīdzinošās taisnes. Video divi mastu dzeltenie priekšmeti ir lāzera detektori, kas stingri piestiprināti pie iztaisnotajām malām.
Lāzers stāv kaut kur tālāk, un tas rada horizontālu līniju.
Motori būtu piestiprināti pie ratiņiem un vītņotie skrūves - izlīdzināšanas taisnēm ar lāzera detektoriem. Lai izlīdzinātu abas puses, jābūt diviem motoriem, bet tas ir spoguļattēls.
Vienīgā kopīgā daļa būtu divkanālu H-tilts, it kā es to darītu no gatavā moduļa un, iespējams, no žiroskopa, bet tas ir sapnis :).
Ir svarīgi, lai kreisās un labās motora apgriezieniem būtu poga.
Procedūra ir šāda. Es, piemēram, pakarinu lāzeru 2 m virs noteiktā grīdas līmeņa. Es izmēru 2 metrus no lāzera stara līdz taisņu apakšējai malai.
Es regulēju augstuma nospiešanas pogas slēdžus pa labi-pa kreisi tā, lai tas būtu vienāds ar 2 metriem līdz taisņu apakšējai malai. Es uzlieku detektorus uz mastiem tā, lai lāzera stars būtu nulles līmenī starp fotodiodu sekcijām. Un pārējais darīs pats
Pielikumā es ievietoju detektora darbības zīmējumu.
Rafals
Shēmas dizains

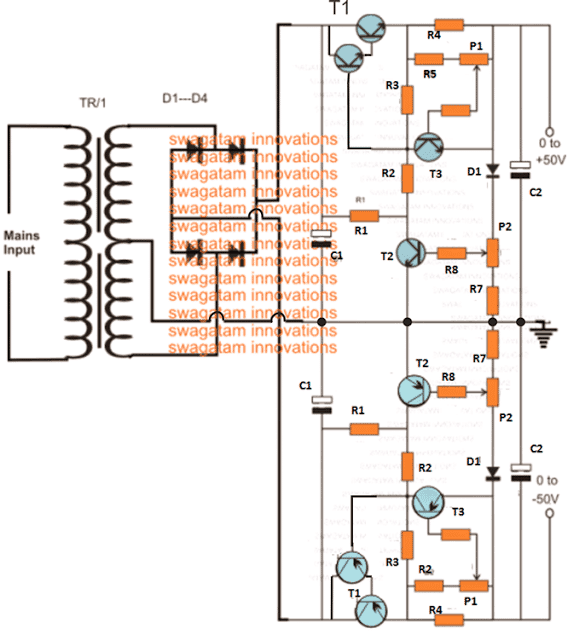
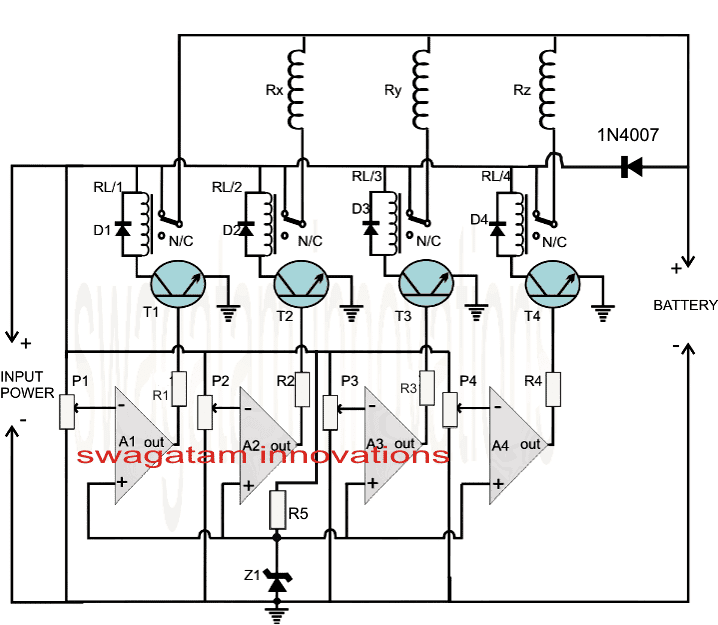
Aplūkojot iepriekš redzamo attēlu, būs nepieciešami divi šādi identiski ķēdes posmi, lai noteiktu un koriģētu saistīto motora vadīto instrumentu attiecībā uz lāzera līnijas taisnuma precizitāti.
Divi identiski posmi ir viens otra spoguļattēli, kā parādīts zemāk:

Shēma ir diezgan vienkārša. Tas darbojas ar logu salīdzinātāju, kas nodrošina, ka piedziņas motori nedarbojas, kamēr LDR pāri tiek pakļauti vienādam lāzera līnijas spilgtumam.
Pēc tam tiek izveidota puse barošanas sprieguma uz A1 neinvertējošās ieejas un A2 apgrieztās ieejas.
Tiklīdz tiek konstatēta novirze lāzera līnijā (kas var notikt, ja motora vadītais rīks nav taisni izlīdzināts), mainās spilgtums, kas ietekmē LDR R1 un R2.
Šajā situācijā loga salīdzinātāja ieejas spriegums novirzās no pusi no barošanas sprieguma. Šī situācija liek komparatora izejai komandēt motora tilta tīklu virzīt motoru pulksteņrādītāja kustības virzienā vai pretēji pulksteņrādītāja virzienam.
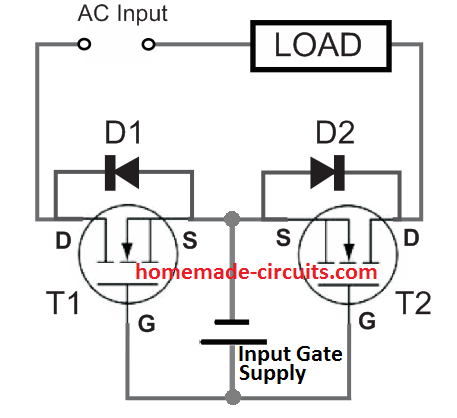
Tranzistori T1. . . T4 ir konfigurēti kā tilta tīkls, lai iespējotu motora ieslēgšanu virzieni uz priekšu un atpakaļ atkarībā no LDR apgaismojuma vai lāzera līnijas novirzes leņķa.
Diodes D1. . . D4 ir novietoti, lai atceltu sprieguma maksimumus, kas radušies laikā, kad motors darbojas un darbojas. Iepriekš iestatīto potenciometru P1 un P2 funkcija ir atvieglot izlīdzināšanas regulēšanu.
Tie ir precīzi noregulēti, lai nodrošinātu motora pilnīgu izslēgšanu un neaktivitāti, kamēr attiecīgais LDR pāris tiek pakļauts tieši tādam pašam lāzera gaismas spilgtumam.
Pieņemsim, ka, piemēram, motora kontrolēta instrumenta nepareizas izlīdzināšanas dēļ lāzera līnijas slīpums izraisa gaismas samazināšanos uz LDR R2 nekā LDR R1. Tā rezultātā spriegums punktā A pieaugs virs barošanas sprieguma.
Šajā situācijā A1 op amp izeja kļūst augsta, liekot darboties tranzistoriem T1 un T4. Tas savukārt liek motoram griezties attiecīgajā virzienā. Šī darbība automātiski pārvieto pievienoto instrumentu taisnā līnijā, līdz tā horizontālās izlīdzināšanas precizitāte sakrīt ar lāzera līnijas precizitāti.
Un otrādi, ja mēs pieņemam, ka rīks ir noliekts pretējā virzienā tā, ka LDR apgaismojums ir pretējs iepriekš aprakstītajam, spriegums punktā A samazinās zem pusi no barošanas sprieguma. Šis nosacījums liek izejas A2 op ampam iet uz augšu tā, ka T3 un T2 sāk darboties.
Tā rezultātā motors tagad darbojas pretējā virzienā, mēģinot labot instrumenta izlīdzinājumu attiecīgajā virzienā, līdz tas kļūst pilnīgi taisns, sakrītot ar lāzera līnijas horizontālo precizitāti.
Poga Uz augšu / Uz leju
Pogas augšup uz leju, lai sākotnēji iestatītu līmeņrādes augstumu, var vienkārši ieviest, vadot spiedpogu slēdžus paralēli katram no LDR.
LDR uzstādīšana
Lai saņemtu pareizu reakciju no LDR, kreisie un labie pāri ir jāuzstāda caurules iekšpusē, piemēram, kamerā, lai viņi varētu 'redzēt' tikai lāzera apgaismojumu, nevis citu apkārtējo gaismu.
Ideju var redzēt šādā attēlā:

Šeit mēs varam redzēt, ka LDR ir izvietoti ļoti tuvu viens otram, kas nodrošina, ka tad, kad lāzera līnija atrodas precīzā centrā, daļu no abiem LDR pāriem vienmērīgi apgaismo lāzera gaisma.
LDR korpusa priekšpusi varēja pārklāt ar izkliedētu objektīvu, lai lāzera apgaismojumu vienmērīgi varētu izkliedēt iekšpusē virs attiecīgajiem LDR.
Pāri: Vienkārša pretaizdzīšanas trauksmes shēma, lai aizsargātu vērtīgus priekšmetus Nākamais: Universālā BJT, JFET, MOSFET testera shēma