Elektriskā mašīna, kas pārveido elektrisko enerģiju mehāniskajā enerģijā sauc par elektromotoru. Pirmkārt un galvenokārt elektrodzinējs ir vienkārša elektrostatiska ierīce, ko 1740. gados izveidoja skotu mūks Endrjū Gordons. Bet 1821. gadā Maikls Faradejs demonstrēja elektriskās enerģijas pārveidošanu mehāniskajā enerģijā.
Elektromotori galvenokārt tiek iedalīti divās kategorijās: maiņstrāvas motori un Līdzstrāvas motori . Katra kategorija atkal ir sadalīta daudzos veidos. Daudzas kravas, piemēram, maisītājs, dzirnaviņas, ventilatori utt., Visbiežāk lietotā sadzīves tehnika, kurā mēs varam atrast dažāda veida motorus, un tos var darbināt ar dažādu ātrumu, kontrolējot motoru ātrumu. Šajā rakstā mēs apspriedīsim vienu no galvenajiem līdzstrāvas motoru veidiem, proti Stepper motors un tā vadība izmantojot mikrokontrolleru.
Stepper motors
Sinhronais un līdzstrāvas motors bez sukām kas pārveido elektriskos impulsus mehāniskās kustībās un tādējādi pakāpeniski rotē ar noteiktu leņķi starp katru soli, lai pabeigtu pilnīgu rotāciju, sauc par Stepper Motor. Leņķi starp soļu motora rotācijas pakāpēm sauc par motora pakāpiena leņķi.

Stepper motors
Stepper motori pēc to tinuma tiek klasificēti divos veidos: Unipolar Stepper Motors un Bipolar Stepper Motors. Vienpola pakāpienu motors tiek bieži izmantots daudzās lietojumprogrammās, pateicoties tā darbības vienkāršībai salīdzinājumā ar bipolāro pakāpienu motoru. Bet ir dažādi pakāpienu motoru veidi, piemēram, pastāvīgā magnēta soļu motors, mainīgas nevēlamības pakāpienu motors un hibrīda pakāpienu motors.
Stepper motora vadība
Stepper motoru var vadīt, izmantojot dažādas metodes, taču šeit mēs apspriežam stepper motoru vadību, izmantojot Atmega mikrokontrolleris . 89C51 ir ierīces mikrokontrolleris 8051 mikrokontrolleru saime .

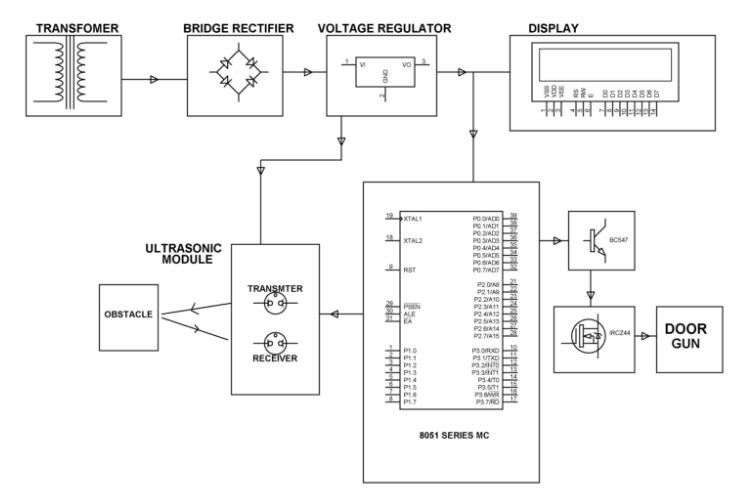
Stepper motora vadības blokshēma
Stepper motora vadības blokshēma, izmantojot mikrokontrolleru 8051, parādīta attēlā ar enerģijas padeve , mikrokontrolleru, soļu motoru un vadības slēdžu blokus.
2 metodes soļu motora vadības ķēdes projektēšanai
Ir paredzēts stepper motora kontrolieris izmantojot 8051 mikrokontrollerus un komutācijas ķēde soļu motora ātruma kontrolei. Vadības slēdža ķēdi var izveidot, izmantojot tranzistora slēdži vai izmantojot tranzistoru vietā soļu motora kontrolieri IC, piemēram, ULN2003.
1. Vadības ķēde, izmantojot Stepper Motor Controller IC
Vienpolu pakāpienu motoru var pagriezt, statora spoles aktivizējot secīgi. Šo sprieguma signālu secība, kas tiek lietota visā motora spolēs vai vados, ir pietiekama, lai darbinātu motoru, un tāpēc strāvas virziena kontrolēšanai statora spolēs nav nepieciešama vadītāja ķēde.

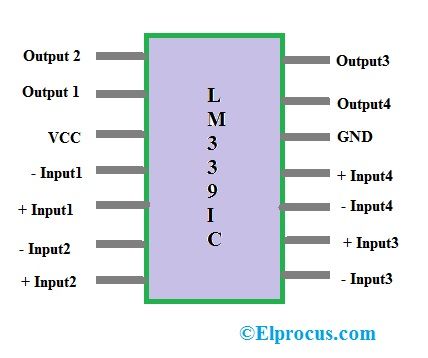
Stepper motora vadība, izmantojot IC
Divfāžu pakāpienu motors sastāv no četriem gala vadiem, kas savienoti ar spolēm, un diviem kopīgiem vadiem, kas savienoti ar diviem gala vadiem, veidojot divas fāzes. Divu fāžu kopīgie punkti un beigu punkti ir savienoti attiecīgi ar zemi vai Vcc un mikrokontrollera tapām. Lai pagrieztu motoru, jāieslēdz divu fāžu galapunkti. Pirmkārt, 1. fāzes pirmajam gala punktam tiek piemērots spriegums, bet 2. fāzes pirmajam gala punktam - utt.
Stepper motoru var darbināt dažādos režīmos, piemēram, Wave Drive Stepping Mode, Full Drive Stepping Mode un Half Drive Stepping Mode.
Viļņu piedziņas pakāpiena režīms
Atkārtojot iepriekš minēto secību, motoru var pagriezt viļņu piedziņas pakāpiena režīmā pulksteņrādītāja virzienā vai pretēji pulksteņrādītāja virzienam, pamatojoties uz gala punktu izvēli. Zemāk esošajā tabulā parādīta signāla fāžu secība viļņu piedziņas pakāpiena režīmam.


Viļņu piedziņas pakāpiena režīms
Pilnas piedziņas pakāpiena režīms
Vienlaicīgi aktivizējot divu dažādu fāžu divus galapunktus, tiek iegūts pilnas piedziņas pakāpiena režīms. Tabulā parādīta signāla fāžu secība pilnpiedziņas darbības režīmam.


Pilnas piedziņas pakāpiena režīms
Puse piedziņas pakāpiena režīms
Viļņa un pilnas piedziņas pakāpienu režīmu kombinācija nodrošina puspiedziņas pakāpiena režīmu. Tādējādi šajā režīmā pakāpiena leņķis tiek sadalīts uz pusēm. Tabulā parādīta signāla fāžu secība puspiedziņas pakāpiena režīmā.


Puse piedziņas pakāpiena režīms
Kopumā pakāpiena leņķis ir atkarīgs no soļa motora izšķirtspējas. Thepsu lielums un rotācijas virziens ir tieši proporcionāls ievades secības skaitam un secībai. Vārpstas rotācijas ātrums ir atkarīgs no ieejas secības biežuma. Griezes moments un vienā laikā magnetizēto magnētu skaits ir proporcionāls.
Stepper motoram nepieciešama 60mA strāva, bet Atmega mikrokontrollera AT89C51 maksimālais strāvas stiprums ir 50mA. Tātad, stepper-motor-kontrolieris ICizmantots, lai sazinātos stepper motoru ar mikrokontrolleru signālu pārsūtīšanai.
2. Vadības slēdža ķēde, izmantojot tranzistorus
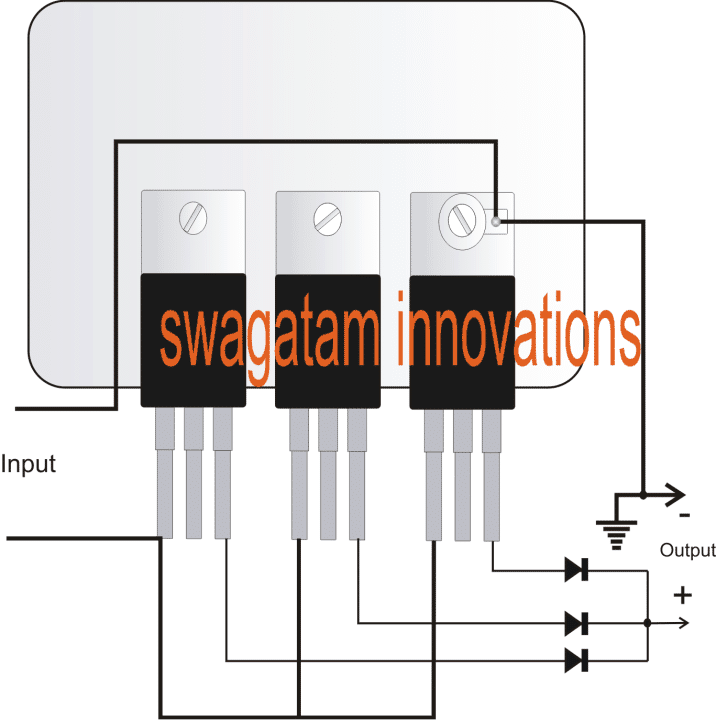
Strāvas padevi ķēdei var nodrošināt, samazinot spriegumu no 230 V līdz 7,5 V, izmantojot pazeminošo transformatoru, un pēc tam taisnošana ar tilta taisngriezi ar diodēm . Šī iztaisnotā izeja tiek ievadīta filtra kondensatorā un pēc tam tiek izvadīta caur sprieguma regulatoru. 5V regulēto izeju iegūst no sprieguma regulatora. Reset pin9 ir savienots starp kondensatoru un rezistoru.

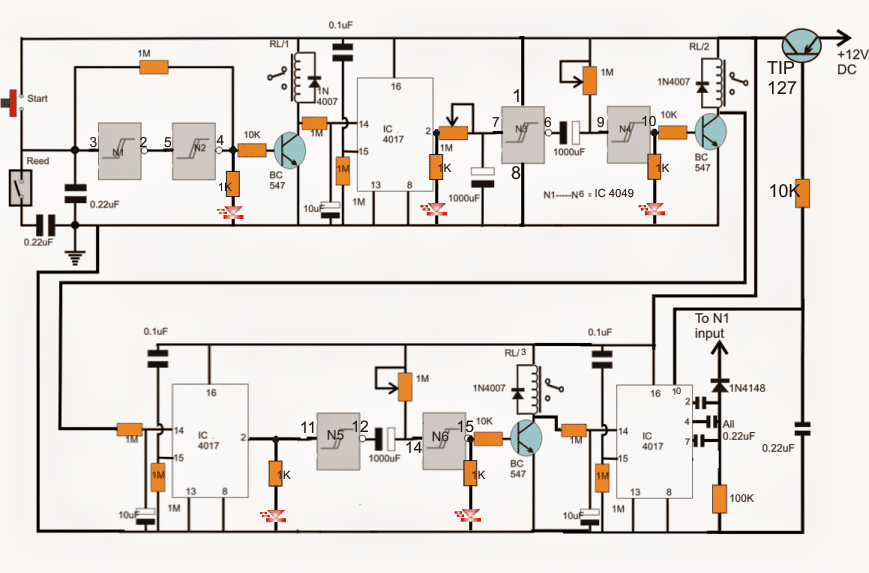
Stepper motora vadības ķēde, izmantojot tranzistoru
Kopumā soļu motors sastāv no četrām spolēm, kā parādīts attēlā. Tātad, lai darbinātu motoru, ir nepieciešamas četras motora-vadītāja ķēdes. Tā vietā, lai motora darbināšanai izmantotu pakāpju motora kontrolieri IC, četri tranzistori ir savienoti kā vadītāja ķēdes attiecīgi pie 21, 22, 23 un 24 mikrokontrollera tapām.
Ja tranzistori sāk vadīt, tad ap spoli tiks izveidots magnētiskais lauks, kas izraisa motora rotāciju. Stepper motora ātrums ir tieši proporcionāls ieejas impulsa frekvencei. Kristāla oscilators ir savienots ar tapām 18 un 19, lai nodrošinātu mikrokontrolleru pulksteņa frekvenci aptuveni 11,019MHz.
Jebkuras instrukcijas izpildes laiku var aprēķināt, izmantojot šādu formulu
Laiks = ((C * 12)) / f
Kur C = cikla numurs
F = kristāla frekvence
Tālāk ir aprakstīta viena no lietojumprogrammām balstītajām ķēdēm, kurās saules paneļa rotēšanai tiek izmantots pakāpienu motors.
Stepper motora vadība, izmantojot programmētu 8051 mikrokontrolleru
Saules izsekošanas saules paneļa projekts ir paredzēts, lai ģenerētu maksimālo enerģijas daudzumu, automātiski pielāgojot saules paneli. Šajā projektā soļu motors, ko kontrolē ieprogrammēts 8051 ģimenes mikrokontrolleris, ir savienots ar saules paneli, lai saglabātu saules paneļu seju vienmēr perpendikulāri saulei.

Stepper motora vadība, izmantojot mikrokontrolleru, autors Edgefxkits.com
The ieprogrammēts mikrokontrolleris ģenerē pakāpeniskus elektriskos impulsus ar pakāpienu motoru, lai rotētu saules paneli. Vadītāja IC tiek izmantots stepper motora piedziņai, jo kontrolieris nespēj nodrošināt motora jaudas prasības.
Lūdzu, atstājiet savus ieteikumus, atsauksmes un jautājumus, ievietojot komentārus zemāk esošajā komentāru sadaļā. Mēs darīsim visu iespējamo, lai tehniski jums palīdzētu attiecībā uz šo rakstu un elektrisko un elektronisko projektu izstrāde izmantojot soļu motoru.