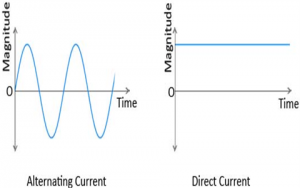
Šajā ziņojumā ir apspriesta vienfāzes mainīgas frekvences piedziņas ķēde vai VFD ķēde, lai kontrolētu maiņstrāvas ātrumu, neietekmējot to darbības specifikācijas.
Kas ir VFD
Motori un citas līdzīgas induktīvās slodzes īpaši nepatīk “darboties” ar frekvencēm, kas, iespējams, neatbilst to ražošanas parametriem, un mēdz kļūt daudz neefektīvas, ja to piespiež šādos neparastos apstākļos.
Piemēram, motoram, kas paredzēts darbībai ar 60Hz, var nebūt ieteicams strādāt ar frekvencēm 50 Hz vai citiem diapazoniem.
Tas var radīt nevēlamus rezultātus, piemēram, motora sakaršanu, mazāku vai lielāku par nepieciešamo apgriezienu skaitu un neparasti lielu patēriņu, padarot lietas ļoti neefektīvas un mazāku pievienotās ierīces dzīves pasliktināšanos.
Tomēr motoru darbība dažādos ieejas frekvences apstākļos bieži kļūst par piespiešanu, un šādās situācijās VFD vai mainīgas frekvences piedziņas ķēde var kļūt ļoti ērta.
VFD ir ierīce, kas ļauj lietotājam kontrolēt maiņstrāvas motora ātrumu, pielāgojot ieejas padeves biežumu un spriegumu atbilstoši motora specifikācijām.
Tas arī nozīmē, ka VFD ļauj mums darbināt jebkuru maiņstrāvas motoru, izmantojot jebkuru pieejamo tīkla maiņstrāvu, neatkarīgi no tā sprieguma un frekvences parametriem, atbilstoši pielāgojot VFD frekvenci un spriegumu atbilstoši motora specifikācijām.
To parasti veic, izmantojot norādīto vadību mainīgas pogas formā, kas mērogota ar dažādu frekvences kalibrēšanu.
VFD izgatavošana mājās var šķist grūts piedāvājums, tomēr, apskatot zemāk piedāvāto dizainu, redzams, ka galu galā nav tik grūti izveidot šo ļoti noderīgo ierīci (kuru esmu izstrādājis).
Ķēdes darbība
Kontūru var principā sadalīt divos posmos: Puse brige vadītāja posms un PWM loģiskā ģeneratora posms.
Puse tilta draivera posmā tiek izmantots pus tilta draiveris IC IR2110, kas viens pats rūpējas par augstsprieguma motora piedziņas pakāpi, iekļaujot attiecīgi divus augstos un zemos sānus.
Vadītāja IC tādējādi veido ķēdes sirdi, tomēr šīs izšķirošās funkcijas īstenošanai ir nepieciešami tikai daži komponenti.
Tomēr iepriekšminētajam IC būtu nepieciešama augsta loģika un zema loģika frekvencēs, lai savienoto slodzi darbinātu vēlamajā specifiskajā frekvencē.
Šie hi un lo ievades loģiskie signāli kļūst par vadītāja IC darbības datiem, un tajos jāiekļauj signāli, lai noteiktu noteikto frekvenci, kā arī PWM, kas atrodas fāzē ar tīkla maiņstrāvu.
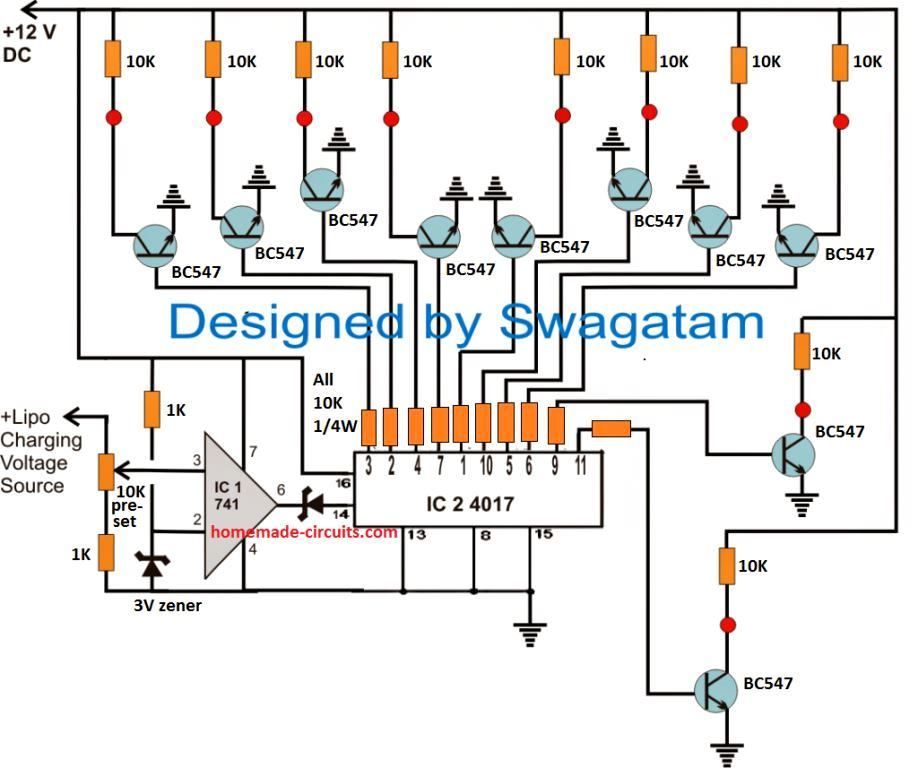
Iepriekš minēto informāciju izveido cits posms, kurā ietilpst pāris 555 IC un desmitgades skaitītājs. IC 4017.
Abi 555 IC ir atbildīgi par modificēto sinusoidālo viļņu PWM ģenerēšanu, kas atbilst pilna viļņa maiņstrāvas paraugam, kas iegūts no pakāpeniskas tilta taisngrieža izejas.
IC4017 darbojas kā totēma polu izejas loģikas ģenerators, kura mainīgā frekvences frekvence kļūst par ķēdes GALVENO frekvences noteikšanas parametru.
Šī noteikšanas frekvence tiek noplūkta no IC1 tapas Nr. 3, kas arī izplata IC2 sprūda tapu un lai izveidotu modificētus PWM IC2 tapā Nr. 3.
Pirms IR2110 padeves modificētie sinusoidālā viļņa PWM tiek skenēti pie 4017 IC izejām, lai modificēto PWM precīzu “izdruku” uzliktu pustilta draivera izvadē un galu galā darbināmam motoram.
Cx un 180 k pot vērtības ir atbilstoši jāizvēlas vai jāpielāgo, lai nodrošinātu pareizu norādīto motora frekvenci.
Augstspriegums pie augstā sāna mosfeta kanalizācijas ir arī atbilstoši jāaprēķina un jānosaka, izlīdzinot pieejamo tīkla spriegumu AC pēc tam, kad tas ir atbilstoši palielināts vai nolaists atbilstoši motora specifikācijām.
Iepriekš minētie iestatījumi noteiks konkrētajam motoram pareizos voltus uz herciem (V / Hz).
Barošanas spriegumu abiem posmiem var padarīt par kopīgu līniju, tādu pašu kā zemes pieslēgumam.
TR1 ir pakāpenisks 0–12 V / 100 mA transformators, kas nodrošina ķēdēm nepieciešamo darba spriegumu.
PWM kontroliera shēma

Jums būs atbilstoši jāintegrē IC 4017 izejas no iepriekš minētās diagrammas ar šīs diagrammas HIN un LIN ieejām. Pievienojiet norādītās 1N4148 diodes iepriekš minētajā diagrammā ar zemo sānu MOSFET vārtiem, kā parādīts zemāk redzamajā diagrammā.
Pilna tilta motora vadītājs

Atjaunināt:

Iepriekš aprakstīto vienkāršo viena VFD dizainu var vēl vairāk vienkāršot un uzlabot, izmantojot pašvibrējošo pilno tiltu IC IRS2453, kā parādīts zemāk:
Šeit IC 4017 tiek pilnībā izslēgts, jo pilnā tilta vadītājs ir aprīkots ar savu oscilatora pakāpi, un tāpēc šim IC nav nepieciešama ārēja iedarbināšana.
Būdams pilnīgs tilta dizains, motora izejas kontrolei ir pilns diapazons no nulles līdz maksimālajam ātrumam.
Katlu IC 2 tapā Nr. 5 var izmantot, lai kontrolētu motora ātrumu un griezes momentu, izmantojot PWM metodi.
V / Hz ātruma kontrolei Rt / Ct, kas saistīts ar IRS2453, un R1, kas saistīts ar IC1, var attiecīgi pielāgot (manuāli), lai iegūtu atbilstošus rezultātus.
Vēl vairāk vienkāršojot

Ja jums šķiet, ka visa tilta sadaļa ir milzīga, varat to aizstāt ar P, N-MOSFET balstītu pilna tilta ķēdi, kā parādīts zemāk. Šis mainīgās frekvences draiveris izmanto to pašu koncepciju, izņemot pilna tilta draivera sadaļu, kurā augstākajā pusē tiek izmantoti P-kanālu MOSFET un zemajā pusē - N-kanālu MOSFET.
Lai gan konfigurācija var izskatīties neefektīva P-kanālu MOSFET iesaistīšanās dēļ (to augstā RDSon vērtējuma dēļ), daudzu paralēlu P-MOSFET izmantošana varētu izskatīties kā efektīva pieeja zemas RDSon problēmas risināšanai.
Šeit 3 MOSFET tiek izmantoti paralēli P-kanālu ierīcēm, lai nodrošinātu minimālu ierīču sasilšanu, līdzvērtīgi N-kanālu kolēģiem.
Pāri: Kā aizsargāt MOSFET - paskaidroti pamati Nākamais: I / V izsekošanas shēma Saules MPPT lietojumprogrammām