
Mūsdienās robotika kļūst par vienu no progresīvākajām tehnoloģiju jomā. The robotikas pielietojums galvenokārt nodarbojas ar automobiļiem, medicīnu, celtniecību, aizsardzību un tiek izmantots arī kā ugunsdzēsības robots palīdzēt cilvēkiem no ugunsnelaimes. Bet robota vadīšana ar tālvadības pulti vai slēdzi ir diezgan sarežģīta. Tātad tiek izstrādāts jauns projekts, tas ir, uz akselerometra balstīts žestu vadības robots. Šī projekta galvenais mērķis ir kontrolēt robota kustību ar rokas žestu, izmantojot akselerometru.

Akselerometra bāzes robots ar žestu vadību
Akselerometra bāzes robots ar žestu vadību
Šis projekts ietver raidītāja un uztvērēja sadaļu. The nepieciešamās sastāvdaļas lai izveidotu šo projektu, ir Ht12e, Ht12d, L293D, AT89S52, 7805, kondensators, kristāls, PBT savienotājs, vienpola antena, rezistors, LED, akselerometrs un akumulators. Akselerometrs ir būtiska ierīce šajā projektā.
akselerometrs vai raidītāja ierīce ir atkarīga no rokas žesta. Izmantojot raidītāja ierīci, tiek saņemta komanda, kas tiek apstrādāta ar mikrokontrollera At89S51 palīdzību. Šis mikrokontrolleris dod signāls robotam, lai viņš pārvietotos vēlamajā virzienā. Šī robota darbības pamatprincips ir datu signālu pārraide ierīces rādījumiem uz robotā ievietoto mikrokontrolleru. Iepriekš ieprogrammētais mikrokontrolleris darbojas saskaņā ar programmu, kas liek robotam atbilstoši darboties.
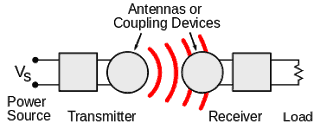
Žestu vadīts robots, izmantojot akselerometru, ir viena veida robots, kuru var darbināt, pārvietojoties ar roku, uz tā novietojot akselerometru. Šis projekts ir sadalīts divās daļās raidītāja un uztvērēja ierīcē. Ja žestu ierīce darbojas kā raidītāja ierīce un robots darbojas kā uztvērēja ierīce. Kad raidītāja ierīce (akselerometrs) tiek novietota uz rokas, tā sūtīs signālus robotam par nepieciešamo darbību.
Galvenie komponenti, kas tiek izmantoti raidīšanas sadaļā, ietver akselerometru, salīdzinātāju, HT12E IC kodētāju un RF raidītājs .
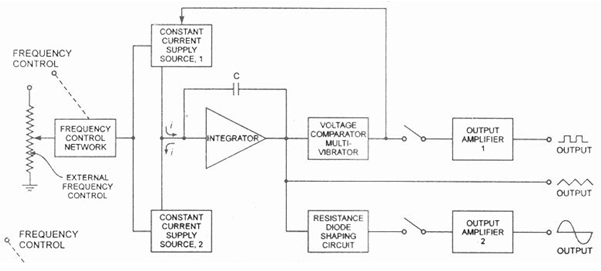
Akselerometrs
Akselerometrs ir viens sensora tips un tas dod analogus datus, pārvietojoties X, Y un Z virzienā. Šie virzieni ir atkarīgi no sensora veida. Akselerometra diagramma ir parādīta zemāk. Šis sensors sastāv no bultiņu virzieniem, ja mēs noliekam sensoru vienā virzienā, tad dati konkrētajā tapā mainīsies analogā veidā. Akselerometrs sastāv no sešām tapām, kur katras tapas funkcija tiek apspriests turpmāk.

Akselerometrs
- 1. kontakts: VDD tapu izmanto, lai šai tapai nodrošinātu + 5 V padevi
- Pin-2: GND tapa ir pievienota zemei, lai veiktu slīpēšanu
- 3. tapa: X tapa saņems datus X virzienā
- 4. tapa: Y tapa saņems datus Y virzienā
- Pin-5: Z pin saņems datus Z virzienā
- Pin-6: ST tapu izmanto, lai pielāgotu akselerometra jutību 1,5g vai 2g vai 3g vai 4g
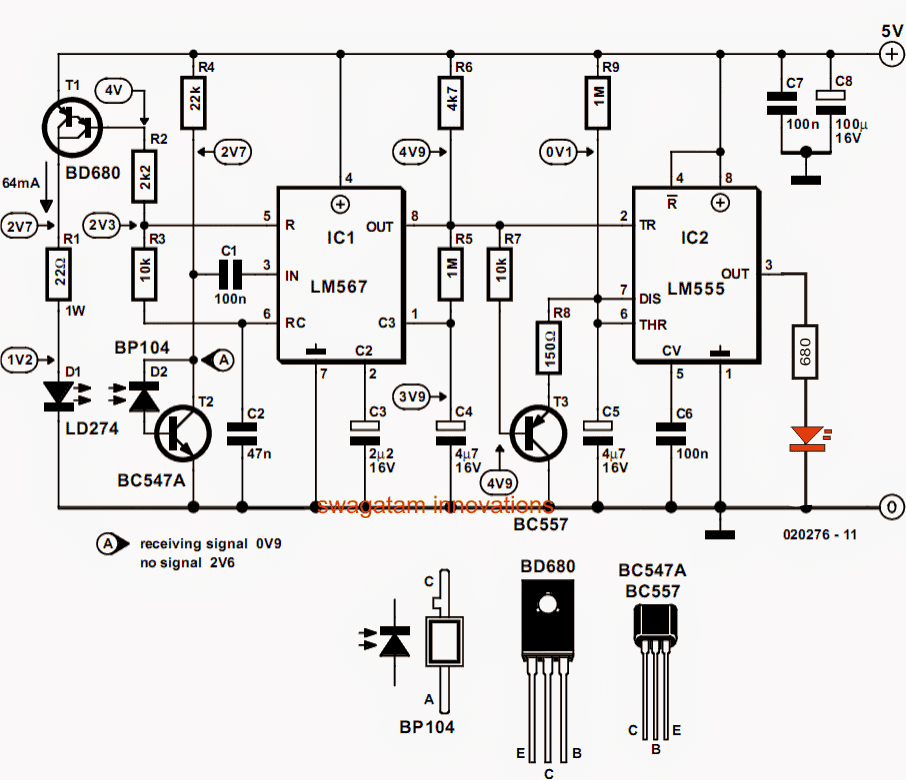
Salīdzinātājs
Salīdzinātājs tiek izmantots, lai mainītu analogo spriegumu ciparu spriegumā, un salīdzina šo analogo spriegumu ar atsauces spriegumu un sniedz precīzu zema vai augsta sprieguma spriegumu
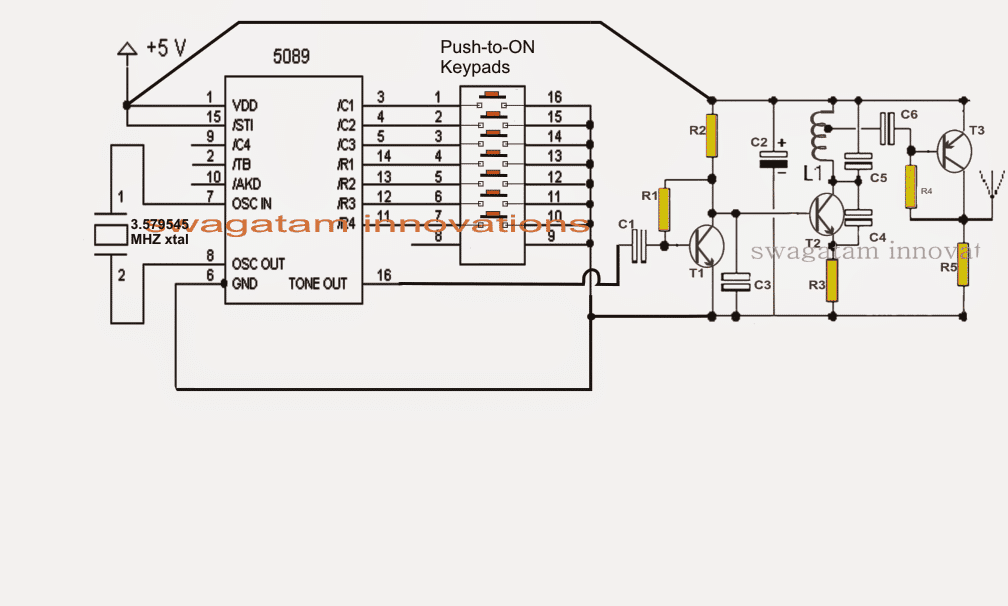
Kodētājs
Šis kodētājs tiek izmantots 4 bitu datu kodēšanai un pārraidei, izmantojot RF raidītāja moduli.
RF raidītāja modulis
RF TX modulis darbojas ar 433MHz frekvenci, un šis modulis ir viegli pieejams tirgū ar zemām izmaksām
Galvenie uztvērēja sadaļā izmantotie komponenti ir uztvērējs, dekoders, mikrokontrolleris un motora draiveris.

Raidītāja sadaļa
RF uztvērējs
Šī projekta RF uztvērējs saņems datus, kurus pārsūta raidošā ierīce.
Dekoders
Dekoderu izmanto, lai sērijas datus mainītu par paralēliem datiem, kas tiek saņemti no RF uztvērēja moduļa.
Mikrokontrolleris
The mikrokontrolleris ir vissvarīgākā daļa robota. Lai piešķirtu lēmuma spēju, ķēdē tiek izmantots 8051 ģimenes mikrokontrolleris
Motora vadītājs
Motora vadītājs ir ierīce, kas dod kustību veikt tādu uzdevumu kā motors. Tāpēc mēs pieprasām, lai motora vadītājs tos palaistu caur kontrolieri. Saskarni starp motoru un mikrokontrolleru var veikt, izmantojot L293D motora draivera IC šajā ķēdē.
Uztvērēja sadaļā RF uztvērēja modulis saņem datus no raidītāja. Saņemtos datus var dekodēt ar IC HT12D. Saņemtos datus var apstrādāt ar mikrokontrolleru AT89S51, un motora vadībai tiek izmantots motora vadītājs.

Uztvērēja sadaļa
Žestu vadības robots darbojas
Akselerometra bāzēts robots, kas balstīts uz žestu, pārvietojas atbilstoši rokas kustībai, kad mēs uzliekam akselerometru uz rokas. Kad mēs noliecam roku ar akselerometru robota priekšā, tad robots sāk virzīties uz priekšu, līdz tiek dota nākamā kustība. Kad mēs noliecam roku atpakaļ, robots maina virzienu un stāvokli. Tad tas sāk kustēties atpakaļ, līdz tiek dots nākamais signāls. Kad mēs noliecam roku kreisajā pusē, robots pārvietojas kreisajā pusē, līdz tiek dots nākamais signāls. Tādā pašā veidā, kad mēs noliecam roku labajā pusē, tad robots pārvietojas labajā pusē.
Pieteikumi
The akselerometra pielietojums balstīta žestu kontrolēts robots ietver
- Šie roboti tiek izmantoti militāros nolūkos, lai darbotos ar robotiem
- Šie roboti tiek izmantoti medicīniskos nolūkos operācijas vajadzībām
- Šīs robotikas tiek izmantotas būvniecības jomā
- Šīs robotikas tiek izmantotas rūpniecībā, lai kontrolētu trolejbusu un pacēlājus.
Tādējādi tas viss ir par akselerometru balstītu žestu vadības robotu, tā darbību un lietojumprogrammām. Mēs ceram, ka esat labāk izpratis šo koncepciju. Turklāt jebkādas šaubas par šo koncepciju vai elektronikas projekti , lūdzu, sniedziet atsauksmes, komentējot komentāru sadaļā zemāk. Šeit ir jautājums jums, kādi ir akselerometra bāzes žestu vadības robota pielietojumi?
Foto kredīti:
- Akselerometra bāzes robots ar žestu vadību ytimg
- Akselerometrs static.flickr







{kind=link}
{kind=link}