Šajā raksta daļā mēs uzzinām par novatorisku metodi elektrisko transportlīdzekļu pedāļa nospiešanas mehānisma pārveidošanai par attiecīgi mainīgu elektrisko signālu, ko var tālāk izmantot transportlīdzekļa ātruma vadības apstrādei.
Paskaidrotā koncepcija darbosies kā elektronisks akselerators, kas pakāpeniski nospiežot pedāli, palielinās transportlīdzekļa ātrumu un otrādi, izmantojot PWM tehnoloģiju
Ideju pieprasīja Lokesh Maini kungs
Tehniskās specifikācijas
Es esmu mehānisks puisis, šobrīd strādāju pie elektriskā transportlīdzekļa un vēlos kontrolēt sava motora ātrumu, izmantojot pedāli. es nesaņemu sava motora kontrolieri, lūdzu, palīdziet man izveidot savu, es būšu ļoti augsts
pateicīgs
Motora specifikācijas ir 36 voltu, 43 lampu un 1,5 zirgspēku matēts līdzstrāvas motors.
Mehāniskais dizains
Elektroniskajai pedāļa akseleratora versijai galvenokārt būs nepieciešams mehānisms, lai vispirms pārveidotu pedāļa mehānisko nospiešanu par attiecīgi mainīgu elektrisko signālu, lai šo signālu varētu apstrādāt caur signāla procesora posmu, lai vēlamo pārveidotu par praktisku ātruma regulēšanu. transportlīdzeklis.
Daudzas koncepcijas var izmēģināt, piemēram, izmantojot pjezo slodzes sensoru, kapacitatīvu slodzes sensoru, ar rezonanses sensoru utt. Šajā rakstā mēs uzzināsim daudz vienkāršāku manis izstrādāto metodi, kas ietver LED / LDR montāžu tā paša sasniegšanai. .

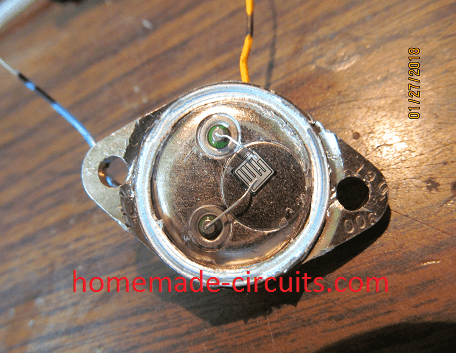
Elektromehāniskajā izvietojumā, kas parādīts attēlā iepriekš, mēs varam redzēt šādus integrētus komponentus:
Neliels zobrats, kas piestiprināts ar skrūves mehānismu.
Skrūves galva ar baltu atstarotāja virsmu
LED / LDR mezgls, kas novietots skrūves galvas priekšā.
Kā darbojas ierosinātais mehānisms.
Pārnesums, kas parādīts iepriekšējā attēlā, ir jānoslēdz ar citu pārnesumu, kura attiecība var būt 10 reizes lielāka par šo pārnesumu.
Lielāks pārnesums jākonfigurē ar pedāļa mehānismu tā, lai tas sāktu rotācijas kustību, reaģējot uz pedāļa nospiešanu.
Rotācijas reakcija no pārnesumiem savukārt radīs skrūves galvas kustību uz priekšu pāri kamerai, kurā atrodas LED / LDR mezgls.
Procesa rezultātā LDR saņem proporcionāli atšķirīgu gaismas diodes atstarotās gaismas daudzumu.
Šos mainīgos datus (mainīgas pretestības formā), kas atbilst pedāļa nospiešanai, pēc tam var ievadīt signāla procesora ķēdē, lai izpildītu konkrētā transportlīdzekļa paredzēto ātruma kontroli.
Iekš nākamā ziņa mēs uzzināsim signāla procesora pakāpi, izmantojot PWM tehniku.
Iekš iepriekš mēs uzzinājām par vienkāršu elektromehāniskā pārveidotāja mezglu, lai pārveidotu pedāļa darbību proporcionāli mainīgā elektriskajā signālā.
Pedāļa darbības pārveidošana par PWM
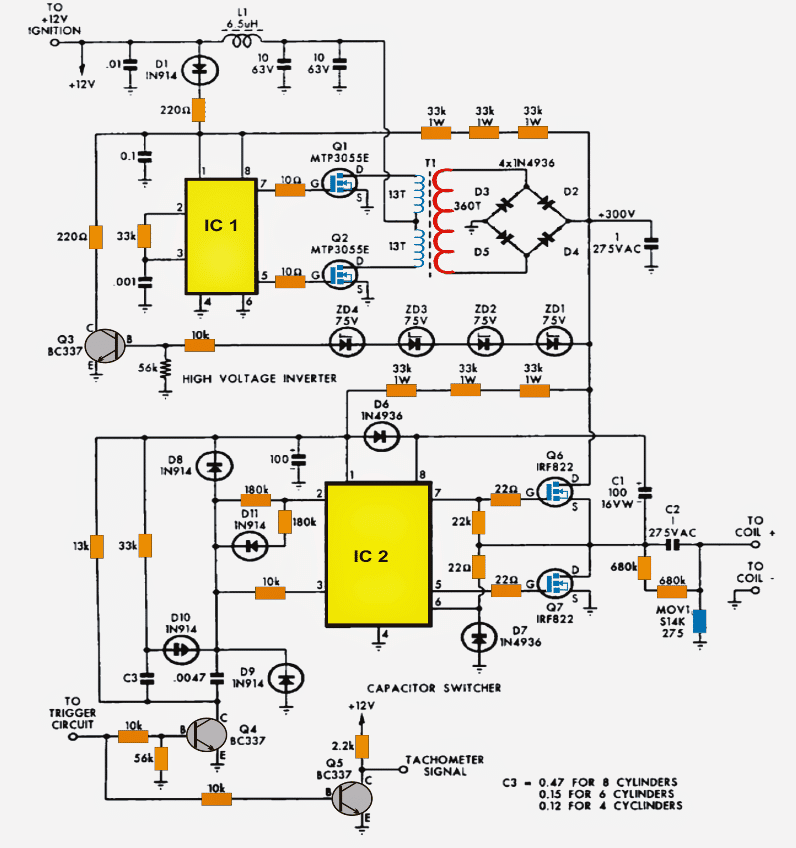
Tagad izpētīsim ķēdes ieviešanu, kas ļaus mums pārveidot pedāļa elektrisko signālu par attiecīgi mainīgu PWM signālu paredzētajam transportlīdzekļa motora ātruma regulēšanai.

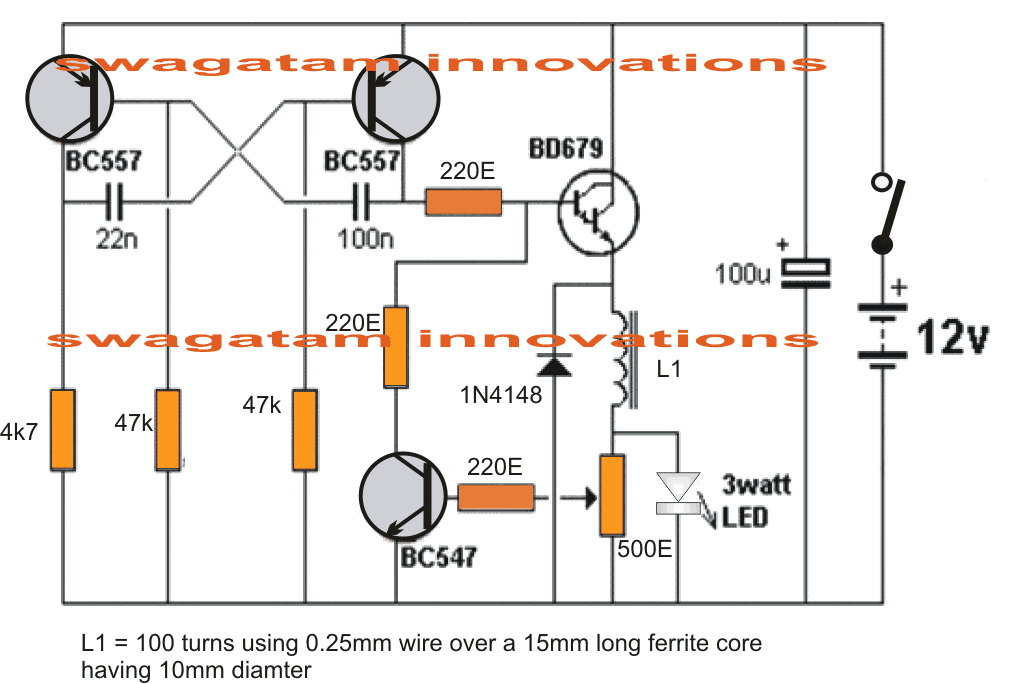
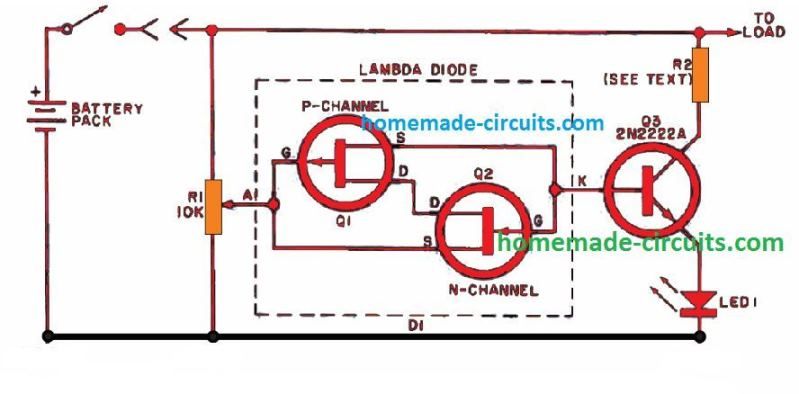
Atsaucoties uz iepriekš minēto shēmu, mēs varam novērtēt ķēdes darbību, izmantojot šādus punktus:
IC1 ir konfigurēts kā 80Hz impulsu ģenerators, kura maksimālais ieslēgšanas laiks un minimālais izslēgšanās laiks ir tā darbības cikls
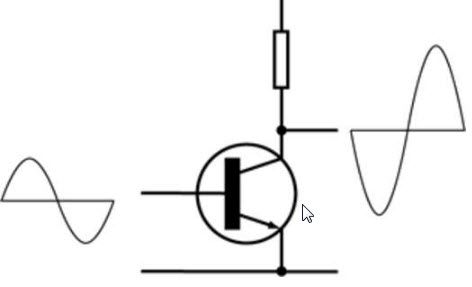
IC2 tiek izmantots kā salīdzinājums, kas vispirms pārveido iepriekšminēto 80Hz impulsu, kas tiek izmantots pie tā pin2, ar trijstūra viļņiem, kas ģenerēti pie tā pin6, un salīdzina trīsstūra viļņus ar modulējošo spriegumu, kas pieejams pie tā pin5.
Pin5 modulējošais spriegums tiek iegūts no BJT BC547 izstarotāja, kas ir konfigurēts kā kopējs kolektors, kura pamatne ir savienota ar LDR ieejām, kas iegūtas, veicot pedāļa darbības.
Atšķirīgās pretestības, reaģējot uz pedāļa nospiešanu, tiek salīdzinātas ar 100K iepriekš iestatīto iestatījumu, un tranzistora pamatnē tiek izveidots proporcionāls sprieguma lielums, kas zemas strāvas ieeju pārveido par līdzvērtīgu augstas strāvas signālu pār IC2 pin5.
Šo momentāno potenciālu līmeni pieņem un apstrādā IC2, radot proporcionālu PWM signālu lielumu MOSFET un pievienotajam motoram.
Tādējādi motora ātrums tiek kontrolēts un mainīts atbilstoši svārstīgajiem PWM, reaģējot uz transportlīdzekļa pedāļa nospiešanu.
Iepriekš minētās procedūras efektīvi pārvērš pedāļa darbību kontrolētā transportlīdzekļa motora un tā ātruma darbībā.
Kā izveidot ķēdi.
Tas ir ļoti vienkārši.
- Nospiediet pedāli līdz maksimālajam punktam tā, lai skrūves galva sasniegtu tuvāko iespējamo pozīciju LED / LDR mezgla priekšā.
- Pēc tam noregulējiet 100 k sākotnējo iestatījumu, līdz IC2 pin3 sāk ģenerēt PWM ar maksimālu platumu. To var apstiprināt, mērot spriegumu pin3, lai tas būtu pēc iespējas tuvāks ķēdes barošanas spriegumam, tas ir, 5 V.
- Kad tas būs izdarīts, varētu uzskatīt, ka iestatīšanas procedūra ir pabeigta.
- Rezultātus tagad varēja pārbaudīt, nospiežot pedāli dažādos līmeņos un pārbaudot, vai motora ātrums mainās vienādi.
Pāri: Vienkārša ESR skaitītāja shēma Nākamais: Kā izveidot Grow Light Circuit