Rakstā ir aplūkota vienkārša infrasarkanās (IR) tālvadības shēma, kas ir konfigurēta līdzstrāvas motora darbināšanai, reaģējot uz pārslēgšanos no standarta infrasarkanā tālvadības tālruņa, piemēram, televizora vai DVD tālvadības pults.
Pievienoto motoru var pārvietot jebkurā veidā, kā arī to var apturēt.
Kontūru var saprast ar šādiem paskaidrojumiem:
Kā tas strādā
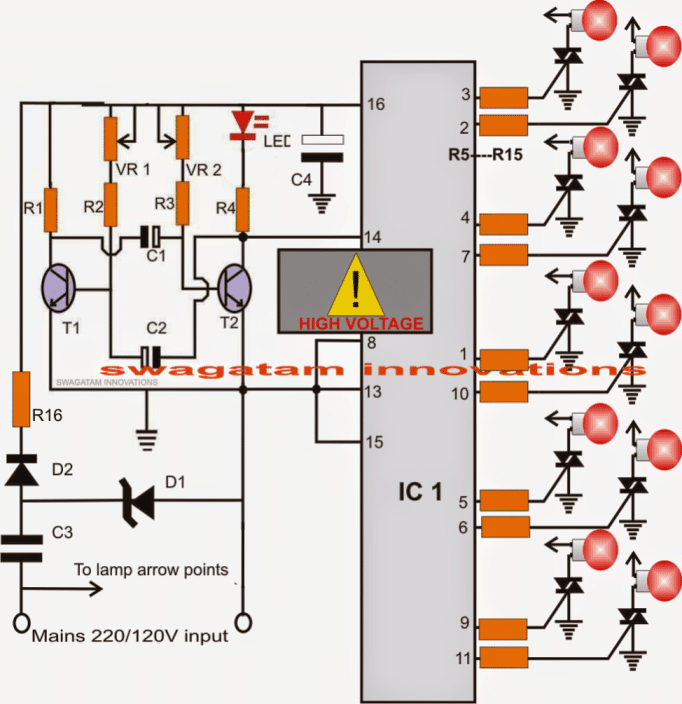
Kā redzams dotajā shēmā, sensors ir jebkurš standarta trīs kontaktu infrasarkanā sensora modulis, kas parasti reaģē uz jebkuru televizora IR tālvadības tālruni.
Kad IR (infrasarkanais) stars ir fokusēts uz sensoru, tapa, kas apzīmēta kā izeja, kļūst maz loģiski. Šī situācija saglabājas tik ilgi, kamēr stars paliek uz to vērsts.
Transistors T1, kas ir PNP, reaģē uz šo loģisko zemo signālu un vada pievienotā releja RL1 pārslēgšanu.
Kontakti uzreiz savieno momentāno pozitīvo potenciālu pie tranzistora kolektora ar IC1 tapu Nr. 14, kas ir savienota kā flip flop ķēde.
Pieņemot, ka sākotnējā loģiskā secība atrodas pie IC 3. kontakta, iepriekšminētā iedarbināšana virza secību uz IC 2. kontaktu, padarot to augstu.
Tas ieslēdz ON T2 un atbilstošo releju RL2.
RL2 vada un savieno konkrēto motora vadu ar negatīvu padevi. Tā kā motora otra spaile saņem pozitīvu rezultātu no RL3, tā sāk virzīties uz iestatīto virzienu.
Tagad pieņemsim, ka sensoram tiek piešķirts nākamais sprūda, izmantojot infrasarkano tālvadības tālruni, iepriekš minētais process atkārtojas un izejas secība pāriet no IC1 tapas # 2 uz tapu # 4, kas uzreiz ieslēdz T3, izslēdzot T2.
Iepriekš minētā darbība atjauno releja savienojumus, liekot motoram uzreiz apgriezt rotācijas virzienu.
Izmantojot vēl vienu tālvadības klausules palaišanu, secība atlec atpakaļ uz tapu Nr. 3, kas nav savienota ar neko un kā rezultātā pilnībā izslēdz motoru.
L1, C1 iekļaušana nodrošina, ka ķēdes netiks ietekmētas ar sensora neīstu iedarbināšanu.
L1 var eksperimentēt, lai iegūtu optimālo vērtību, lai tā “pamatotu” tikai nejaušus klaiņojošus ārējos signālus, nevis faktiskos IR signālus no tālvadības tālruņa.


Iepriekšminētās IR (infrasarkanās) tālvadības motora ķēdes detaļu saraksts.
R1 = 100 omi,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22 uF
C5 = 1000uF / 25V
C6 = 0,22 uF
L1 = 100mH droselis
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Visi releji = 12V / 400 omi / SPDT
sensors = TSOP1738
Motors = 12 V līdzstrāvas motors
Pāri: NTC termistora izmantošana kā pārsprieguma slāpētājs Nākamais: MJE13005 kompakta 220 V barošanas ķēde